قد لا يكون لمحرك الخياطة الكهربائي ، سواء كان آلة صناعية ، تصميمًا مختلفًا لضبط السرعة (الاحتكاك) فحسب ، بل قد يكون له دائرة كهربائية أخرى ، مبدأ تشغيل المحرك الكهربائي.
قد تحتوي بعض طرز المحركات الكهربائية على استهلاك منخفض للطاقة من 40 إلى 110 واط ، وتغليف منخفض السرعة ونوع غير متزامن من المحركات الآلية. بعبارة أخرى ، لا يُظهر المحرك الكهربائي pobutovy الابتكارات العظيمة والتافهة و "الإصلاح" الدوري vimaga. يمكن تشغيل محرك الخياطة للآلة الصناعية دون انقطاع وبدون ارتفاع درجة الحرارة ودون إهدار الحرارة.
إذا كنت بحاجة إلى آلة للخياطة بالجملة ، فما عليك سوى التفكير في محرك جيد. خلف goloshennyami ، يمكنك شراء طاولات مستخدمة غير مكلفة من محركات إصدار Radyansky. Tse nadіynі و pratsezdatnі elektroprivodі ومن الممكن أن تفوز بما يلي. Ale vrahuyte ، scho كل الرائحة الكريهة تعمل بصوت أعلى ، ولن يتم فقدان أي تنظيم للضوضاء. لذلك ، نوصي بإحضارها في الوقت المناسب ، على سبيل المثال ، الفولاذ والرصاص ، والتي يتم تضمينها في المجموعة في ماكينة الخياطة النموذجية. أنا نفسي تمت مراجعة محرك كهربائي للخياطة في هذه المقالة.

يمكنك شراء محرك كهربائي للخياطة من شركة Typical وتثبيته على أي نوع من الأساليب الصناعية ، ولكن من الأفضل أن تستحم اليوجا في مجموعة مع طاولة ، وغالبًا ما يكون النمط نفسه أرخص بالنسبة إلى dvigun.
بالمناسبة ، يمكن شراء فولاذ الخياطة اليدوي لآلة الخياطة المخصصة. يمتد Zruchny من الفولاذ ، وفي نفس الوقت ، يتم خياطة الفولاذ لجعل عملك مريحًا ، والذي يشير obov'yazkovo إلى الحالة المزاجية وقابل للتطبيق على مستوى العمل. حتى لو كانت لديك الفرصة للخياطة كثيرًا ، فلا تنخدع بمثل هذا "المراوغة".

إن التنقل في مثل هذه التفاصيل غير المهمة مثل vimikach لمحرك كهربائي يخلق الراحة في الروبوت وينفخ في الحالة المزاجية.
توتر المحرك الكهربائي والجهد
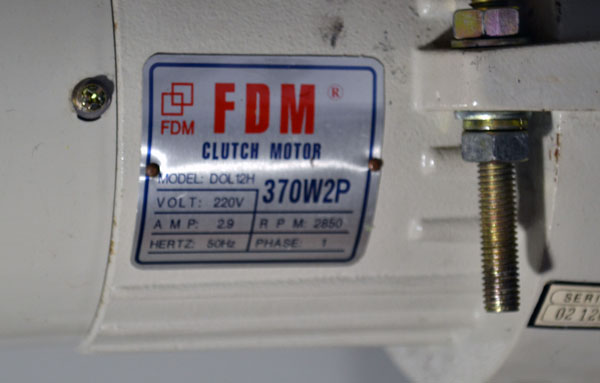
يوجد على الجانب الأمامي للمحرك علامة تشير إلى شد المقياس وضيق المحرك.
إذا اخترت تثبيت سيارة في المنزل أو في استوديو صغير ، فلا يوجد مقبس 380 فولت ، فاختر محركًا كهربائيًا للروبوت بجهد 220 فولت.
وضيق المحرك هذا بعقبلا يمكن أن تكون ذات أهمية خاصة ، فإن oskolki shvidk_st من الروبوتات والآلات يكمن في عوامل أخرى. دعونا نتحدث عنها أدناه.
ما هو محرك الاحتكاك؟ إذا كنت تقود سيارة ، فأنت مسؤول عن معرفة هذا الاتصال. لذا فإن محور احتكاك محرك الخياطة الكهربائي مشابه.
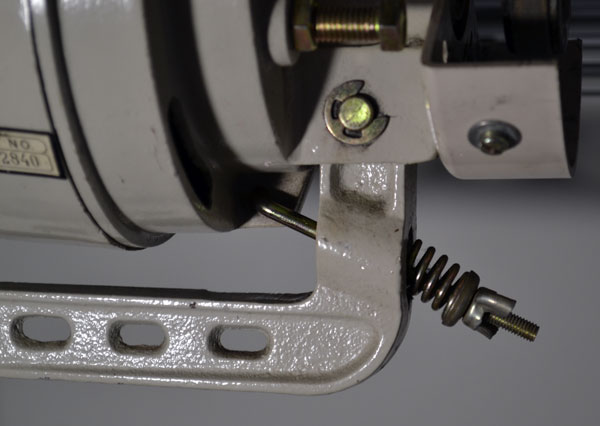
يلف المحرك بالتدريج مع swidkistyu. عند الضغط على الدواسة ، يرتفع قرص مرفق الاحتكاك (فيرادو) المزود بوسادات من القماش إلى دولاب الموازنة في المحرك ويتفاعل معها. كلما ضغطت على قرص الاحتكاك على دولاب الموازنة للمحرك الكهربائي ، كانت أداة التوصيل أفضل وزادت السرعة. لذلك ، في بعض الأحيان في العمل الجاف ، تظهر رائحة المنسوجات المنقوشة على السعة العادية.
يتم تنظيم خطوات العجلة الحرة (بدون سوسيلا) من الدواسة إلى محرك الأقراص بواسطة برغي.
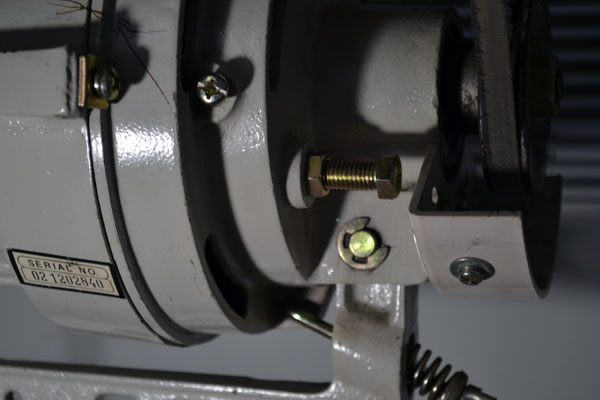
والمحور مزود بمسامير مزدوجة ، وبصورة أدق ، برغيان (z الجانب الصحيواحد أكثر) يتم تنظيم galma. لذا ، فإن الجالما مايزه يشبه السيارة.
إذا كنت تعمل على السويدية العالية ، فبعد أسنان ماكينة الخياطة ، من أجل القصور الذاتي ، ستستمر في الالتفاف. هذا يحتاج إلى galmo ، كما لو كان يبدو وكأنه غلاف غير مناسب بالفعل. محور cim هو المسمار مع قفل الجوز ويتم تنظيم خطوة الحدة من galm.
لم نقم بنشر صورة لقابض الاحتكاك للمحرك ، وإصلاح المحرك هو مسؤولية كهربائي ، ولكن من الضروري ضبط الروبوت بيديك.
من الأفضل هنا ضبط ارتفاع pіdёm chi kut nakhil للدواسة.
Vіd chto وضع swedkіst لآلة الخياطة الصناعية الروبوتية

يجب أن تودع سرعة الروبوت وآلة الخياطة الصناعية معنا أمام عدد لفات المحرك الكهربائي. يمكن العثور على هذه المعلمة في المبادل أو على جواز سفر محرك الأقراص. لكن من غير المرجح أن يتم خدش مثل هذه التفاصيل من قبل المتخصصين في خياطة المصانع. بالنسبة للآلات الأخرى ، تختلف هذه المعلمة الخاصة بالمحرك الآلي ، وتعتبر نوبات التروس طريقة أخرى لتنظيم سرعة ماكينة الخياطة الآلية.

وللمساعدة نفسها ، قم بتغيير بكرة المحرك. كلما زاد قطر البكرة ، زادت محدودية سرعة ماكينة الخياطة الآلية.
ليس من السهل تغيير البكرات ، حيث يلزم وجود مفتاح لـ 19 والبكرة نفسها ، حيث يتم إعطاء صوت للمحرك. حسنًا ، انتظر ، إذا حدث أن قمت بضبط طول حزام القيادة ، وإذا كان لديك الكثير من التقلبات ، فقد يكون لديك قطر أصغر.

ما يجلبه النطق الجيد ، مثل هذا الحديث ، قد يكون صامتًا وجميلًا مثل شركة نموذجية ، لكن لا تحتاج إليه. تسي vіdnositsya إلى واجب منزلي shvachok. غالبًا ما تتم ممارسة الرائحة الكريهة في المنزل على آلات الخياطة الصناعية ، مثل الفئة 1022 ، الفئة 97. لثلاثة أسباب مختلفة ، ولكن في المقام الأول ، لا يمكن لضجيج الروبوت والرائحة الكريهة التغلب عليهم.
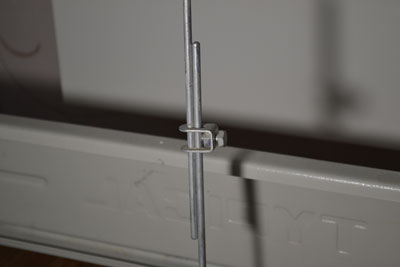
لحل هذه المشكلة بسهولة وبتكلفة زهيدة ، قم بشراء محرك كهربائي TUR-2 وقم بتثبيته مباشرة على جسم الآلة الصناعية. ليس من الممكن شرح كيفية تثبيته ، من وجهة نظر الجلد فمن الممكن التغلب على قرارك الخاص. ويمكننا أيضًا ، إذا لزم الأمر ، استبدال القابس ولحام القضبان ، كما هو موضح في الصورة.
بالإضافة إلى ذلك ، إذا كان على مثل هذا المحرك أن يلحم موضع اللفات بالضباب ، فسيتم لف المحرك في يوم آخر. ستكون سعيدًا عندما تكون متصلاً بمثل هذا محرك الاوفرلوك.
لكن على الرغم من ذلك ، من أجل الاعتراف بالكهربائيين فقط ، لا ينصح عشاق أوكرانيا بالتقاط المحركات بشكل مستقل ، وفي هذا الصدد ، لا ينبغي أن يكون هناك المزيد من اللحام. أنا لست فقط غير آمن بشكل مباشر من هجوم مداعبة أوتار الآلة الموسيقية ، لكني مدمن مخدرات. يتجلى فون في ساعة ثلاثية. في حالة ارتفاع درجة حرارة لفات المحرك ، قم بلفها في المحطة غير العاملة لآلة الخياطة ، ولكن يمكن توصيلها بحافة اللفات.
يمكن أيضًا تثبيت ماركات أخرى من المحركات الكهربائية على الآلات الصناعية ، لكننا نوصي فقط بتلك التي تمت مراجعتها من قبلنا ، والمحرك الكهربائي TUR-2 نفسه.
ولا تنس أن سرعة الآلة الكاتبة الروبوتية قد تقلصت بشكل كبير وأن الخياطة عليها يمكن أن تدوم لفترة قصيرة ، الفواصل الكبيرة (تتوقف مؤقتًا).
في بعض الأحيان تحتاج إلى العثور على ماكينة خياطة ، وبصورة أدق ، قم بإزالة الغلاف البلاستيكي للآلة من أجل الوصول إلى عقدة أخرى. إن مثل هذه الحاجة إلى إلقاء اللوم هي أكثر ندرة ولا يتم إلقاء اللوم عليها إلا إذا كان من الضروري استبدال المحرك الكهربائي لماكينة الخياطة وحزام القيادة. فتم استبدال المحرك الكهربائي أحيانًا بإزالة الغطاء السفلي. ويجب أن يكون المحور "محشورًا" ، سيتعين عليك التقاط الجهاز مرة أخرى.
في هذه المقالة ، تعرف كيفية معرفة سبب فشل المحرك الكهربائي ، وكذلك كيفية استبدال المحرك الكهربائي بشكل مستقل.
يبدو أن مشاكل محرك الخياطة الكهربائي ناتجة عن الدواسات وليس المحرك الكهربائي. لا يوصى برفع الدواسة بشكل مستقل. اعتني بالدواسة ، لا تلوي السهام ، لا "تقف" عليها بأسلوب منخفض وتذكر أن نفاثة كهربائية بجهد 220 فولت يجب أن تمر عبر هذه السهام.

ماكينة خياطة يدوية - تركيب وإصلاح القرص
ماكينة الخياطة ببساطة لا غنى عنها عند خياطة الأقمشة الأخرى والملاحة شكير. ومحور المحرك اليدوي للأرضيات ليس في متناول اليد ، لذلك لا يوجد بازانيا للتغلب عليها. ومع ذلك ، من السهل تصحيح هذا الموقف ، إذا اشتريت محركًا كهربائيًا للخياطة مرة واحدة من الدواسة وحزام القيادة في المجموعة. يمكن تركيب المحرك الكهربائي المصنوع من الجلد بشكل منتظم ، مما يسمح لك بتثبيته على ماكينة الخياطة اليدوية.
المحرك السفلي لآلة الخياطة هو الآن معرض متحف. اقرع الماكياج ، تلك الساق غارقة. قبل ذلك ، غالبًا ما تبدأ الآلة بالدوران في الاتجاه الخاطئ. كيف تتصرف مثل yogo vikoristannya ، مثل آلة Seagull أو Podilska أنت ككل vlashtovu؟ تحتاج فقط إلى تثبيت محرك كهربائي للخياطة. إبزيم لجلد النورس الجديد. المحرك الكهربائي نفسه أقل تكلفة من الحزام الجديد لمحرك القدم.
البادئة المتعرجة لآلة الخياطة عبارة عن مرفق ذكي يقلد صف متعرج بآلة صف مستقيم بسيطة من نوع Podolsk.
في هذه المقالة ، تعرف سبب قيام الماكينة بعمل حلقات بشريط أفقي وكيفية إصلاح العيب في صف الخياطة بيديك.
ماكينة الخياطة غير مخيطة ، لأن غسالة الاحتكاك دولاب الموازنة لم يتم تركيبها بشكل صحيح ، أو أن البطانات والبطانات تصدأ بعد ساعة من العمل الشاق.
يحتوي الطراز الجلدي لآلة الخياطة على مجموعة مختلفة من الأرجل. وصف تقريرالكفوف vykoristannya لماكينات الخياطة شركة Janome.
للعمل مع الجلد الطبيعي ، ستحتاج إلى أدوات خاصة ومرفقات لتثبيت الملحقات والمواد اللاصقة والمواد التطبيقية الأخرى.
Wimogi لقيادة ماكينات الخياطة.
الموضوع: محرك كهربائي لماكينات الخياطة.
محاضرة 7.
في ماكينات الخياطة ، يتم العمل في أذهان مهمة للغاية ، إذا كانت تمتد على مدار العام
تنفيذ ما يصل إلى 1000 تشغيل للماكينة. هل يمكنك العثور على آلة تكنولوجية أخرى بنفس طريقة التشغيل؟ وسرعة رمح الرأس تصل إلى 9000 hv -1! الكثير من التروس لا تتباهى بمثل هذه الجوائز! النجوم ومساعدة خاصة للمحرك الكهربائي:
1. السرعة - بناء الأمن على العمود الرئيسي للآلة (5-6) 10 3 xv -1.
2. مذنب فيتريماتي يصل إلى 1000 vimkneni لمدة عام.
3. بداية سلسة ، تنظيم أكثر سلاسة لسرعة الآلة.
4. التحكم في القيادة - دواسة مع القوة المحدودة للضغط عليها - 60 نيوتن واقفًا ويجلس حتى 150 نيوتن.
5. Mati high K ، P ، D ، (في الورشة تصبح مدخنة بشكل مفرط في حالة عدم وجود آلات خياطة مخيطة بإحكام) ، مخيط يدويًا (لا تزعج المشغل بالجلوس بحرية) ، آمن للروبوت ، سواء في الكهرباء وارتداء ميكانيكي.
6. قد يكون Vartist e / drive موضوع مناقشة خاصة. (في المحركات الكهربائية ، المؤتمتة ، يوجد أكثر من 30 دائرة كهربائية دقيقة ، وهذا التباين يعادل ذلك الموجود في رأس الماكينة!)
في صناعة الخياطة ، هناك ثلاثة أنواع أساسية من المحركات الكهربائية ، اعتمادًا على نوع الماكينة التكنولوجية:
· المقاولين- إذا قمت بتدوير vimikacha أو عن طريق الضغط على الدواسة ، فإن السيارة تلتقط سرعة جواز السفر على الفور. ليس من الضروري لسلاسة بدء التشغيل وتنظيم السرعة. مدفوعة إلى الركود على الآلات الهادئة والبسيطة التي نادرًا ما تومض (إعادة لف القماش ، والدبلجة ، وما إلى ذلك)
· احتكاك- إذا كان بين المحرك الكهربائي غير المتزامن وناقل الحركة على شكل V ، يتم تثبيت قابض احتكاك ، يعمل على الدواسة ، مما يضمن بداية سلسة وتعديل سلس للسرعة أثناء حركة الماكينة. قد يكون اليوم أوسع ، سواء على الآلات العالمية أو الخاصة.
· التشغيل الآليمحرك كهربائي. يسمح لك ببرمجة روبوت الآلة ، وإجراء العمليات الرئيسية والإضافية للدورة التكنولوجية تلقائيًا. غالية الثمن وقابلة للطي ، منخفضة الكفاءة. والاتجاه هو استبدال اليوجا ، دعنا نسامح التنظيم الجيد للمحرك سريع الخطى.
في رقم 5 الصغير ، يتم تقديم مخطط كتلة لقابض الاحتكاك لمحرك الاحتكاك الكهربائي لآلة الخياطة ، والذي تم تعيينه:
1. رمح المحرك الكهربائي غير المتزامن ،
2. قرص موصل ، مثبت بإحكام على نهاية العمود ، بدون بطانات حلقية ، فولاذ ،
قرص مرجعي ، مع وسادات حلقية على كلا الجانبين ، مصنوع من مادة مقاومة للتآكل عالية الاحتكاك.
قرص التثبيت على رمح 6 قابض الاحتكاك.
3. القرص مجلفن وغير متين ، وغالبًا ما يكون عائمًا ، بحيث يكون سطحه مستعادًا ذاتيًا في سطح القرص 3 عند إغلاقه به.
4. ضغط الزنبرك ، وسحب العمود 6 دفعة واحدة من القرص 3 فاصل إلى اليمين حتى يغلق بالقرص 4.
5. رمح المفتي. تناسب الخام مع محمل الكرة الأيسر للجلبة 7 والملاءمة الصحيحة.
6. Rukhoma الأكمام الداخلية أفقيا. الروهاتسيا في جسد المفتي إلى اليد اليمنى واليسرى دفعة واحدة من العمود 6.
7. V- حزام بكرة ، موصل. في الآلات الصناعية القديمة ، تم تركيب بكرتين - واحدة أصغر (لا يظهر رقم 9) - للتشغيل في آلة جديدة أو قديمة للإصلاح ؛ وصلت إلى انخفاض في سرعة السيارة بنسبة 25٪.
10. أسطوانة عند أخدود الجلبة المفكوكة.
11. أهمية ذات كتفين.
12. فحوى ينظم dozhini.
13. بدء الدواسة.
14. جسم المفتي ، وهو مطوي إلى جزأين (غير موضح بالشكل أدناه).
15 . آلات برومستيل.
16. لوحة ، حتى يتوقف جسم الموف عند التجميع من الأسفل. في Sharnirі - آخر gvint ؛ يعمل على تثبيت جسم أداة التوصيل في الموضع المطلوب من أجل إحكام الربط الصحيح لحزام ناقل الحركة V.
جامعة دونيتسك التقنية الوطنية
المؤهل الوظيفي
حول الموضوع:
تطوير نموذج ديناميكي لمحرك به متغير احتكاك
فيكوناف:
طالب غرام. MS-03n: Kasatka P.O.
كيريفنيك: Derkach O.V.
الاستشاري: Gorobets I.O.
دونيتسك 2007
مقال
عمل البكالوريوس: 38 صفحة ، 15 كتابًا صغيرًا ، ملحق واحد ، طاولة واحدة ، 5 دزيرل.
بالنسبة لروبوت البكالوريوس هذا ، من الضروري تطوير نموذج ديناميكي لمحرك الأقراص للانتقام من متغير الاحتكاك ؛ اجمع المعادلات التفاضلية التي تصف العمليات الديناميكية لمحرك الأقراص.
كائن المتابعة: مدفوع بواسطة متغير احتكاك.
Meta work: من الضروري تطوير نموذج ديناميكي لمحرك الأقراص ليحل محل متغير الاحتكاك ، بمساعدة حزمة برامج MatLab Simulink ، لضمان المعلمات الضرورية للعملية الانتقالية.
متغير احتكاك ، عملية انتقالية ، محاذاة تفاضلية ، نموذج ديناميكي ، اقتران هندسي ، لحظة من القصور الذاتي
دخول
1 Zagalni vіdomostіحول مغيرات الاحتكاك
2 بيانات أسبوعية
3 تصميم تصميم مغير الاحتكاك خلف جهد التلامس
4 تطوير نموذج ديناميكي
4.1 رسم تخطيطي للكائن والعملية في الجديد
4.2 تحليل البدلات والعوامل التي تؤخذ في الاعتبار في نموذج المطابقة
4.3 نموذج ديناميكي
4.4 تعيين خصائص القصور الذاتي للأجزاء المتحركة وصلابة عناصر القيادة
4.5 تنفيذ نموذج ديناميكي في Simulink
5 تحليل العمليات الديناميكية في الكائن
5.1 تحليل العمليات الديناميكية في منطقة الساعة
5.2 تقديم نموذج ديناميكي بالقرب من فضاء المحطات
5.3 تصميم وحدة تحكم مشروط
فيسنوفوك
بيريليك بوسيلان
إضافة
دخول
يتم إنشاء معظم الآلات والتركيبات الحديثة وفقًا للمخطط: dvigun - ناقل الحركة - جهاز العمل (vykonavchiy mekhanizm). ترتبط ضرورة نقل رابط وسيط بين المحرك والهيئات العاملة في الماكينة بمهام زيادة الإنتاجية ، على. zbіlshennya їhnёї shvidkodії.
تدخل ساعة تبديل التروس الاحتكاكية الساعة الرئيسية لدورة عمل الماكينة ، مما يؤدي أيضًا إلى زيادة إنتاجية الماكينة في لمح البصر. ترتبط مشكلة زيادة الإنتاجية ارتباطًا مباشرًا بتطوير طرق المتابعة الديناميكية للآلات واختيار المعلمات والهيكل الأمثل لها.
للحصول على نموذج ديناميكي إضافي ، يتم إجراء تحليل للنظام ، دون مشاركة كائن حقيقي ، وعلى هذا الأساس ، من الممكن استحداث نظام تحكم للكائن ، يفترض سلوك نظام التحكم في ذلك هدف.
1 معلومات عامة حول مغيرات الاحتكاك
الاحتكاك يسمى ناقل الحركة ، يعتمد الروبوت على قوى الاحتكاك المنتصرة ، والتي يتم إلقاء اللوم عليها على اتصال جسدين من الالتفاف تحت قوة الضغط Q.
يمكن تقسيم تروس الاحتكاك في اليد الملفوفة إلى مجموعتين رئيسيتين: التروس غير منظمة ، أي. مع نسب تروس سريعة ذهنيًا ، فإن تنظيم الترس هذا يسمح لك بتغيير نسبة التروس بسلاسة (تنظيم غير متدرج) (الشكل 1.1).
واحدة من أبسط وأغنى التقلبات هي استكمال ترس الاحتكاك السطحي ، والذي يتم طيه في أبسط تأرجح للعجلتين (kotkiv) ، مثبتة على أعمدة محرك القيادة. لنقل الحركة بدون تزوير ، من الضروري إضافة قوة Q إلى عجلة واحدة ، وهو ما يكفي للفرك في منطقة التلامس ، حيث تكون قوة السلسلة أقوى من حجم السوسيلا المحيطية التي يتم نقلها.
الشكل 1.1 - متغير الاحتكاك الأمامي
مزايا التروس الاحتكاكية هي: نعومة الروبوت وصمته ، وبساطة التصميم ، واستحالة الكسر أثناء تغيير حادعزم الدوران على أحد أعمدة الريح ، والقدرة على لعق kotkіv ، والقدرة على ضبط السرعة بدون خطوات أثناء التنقل ، بدون ترس تروس.
Nedolіkami є: الحاجة إلى مرفق محكم ، وقبضة كبيرة على العمود تدعم ألوهية قوة المرفق المحكم ، مما سيزيد من حجمها ويجعل ناقل الحركة ضخمًا ، وأيضًا قياس مقدار ضيق ينتقل تباطؤ في الانتقال من خلال لعق القطط ؛ بسبب الاستهلاك العالي.
تتوقف مغيرات الاحتكاك في كل من عمليات نقل الحركة الحركية والقدرة في الاهتزازات ، إذا كنت بحاجة إلى تنظيم السرعة غير المتدرج (لا يسمح ناقل الحركة بمثل هذا التنظيم). تُستخدم المتغيرات الاحتكاكية في الأدوات الآلية ، وفي آلات الخمور ، والآلات الصناعية والنقل ، ومحركات الأجهزة الفتاكة وآلات تشغيل المعادن ، والروبوتات والمعالجات ، وأنظمة خياطة اللحف الرقمية ، وآليات قوة الدولة وأنواع أخرى.
قيمة المتغيرات الاحتكاكية كمنظمين غير متدرجين وزيادة السرعة عند الاتصال بجبهة عريضة تعمل من أتمتة التحكم في العمليات الاهتزازية.
أحد مطروقات مغير الاحتكاك مصنوع من فولاذ الياكيش (40 ، 50 ، ShKh15 ، إلخ) ، والآخر مصنوع من الشافون الرمادي ، والنسيج ، والألياف وأنواع البلاستيك الأخرى.
ثلاثة أنواع من التروس غير الاحتكاكية ذات الأجسام الصلبة المتغيرات الاحتكاكية الالتوائية الأمامية هي الأبسط بشكل بناء. باستخدام مثل هذا المتغير ، من الممكن تحريك العجلة على طول العمود في خطوط مستقيمة ، يشار إليها بالسهام ، مع أي ترس ، يتغير التحول بسلاسة إلى تغيير في قطر العمل للقرص.
يتم تحديد الشكل الهندسي للمتغير من خلال الصيغة:
علامة "+" - لعجلة القيادة ، علامة "-" - لقرص محرك الأقراص (الشكل 1.2 i b) ،
دي - نصف قطر القرص ، عند الحد الأقصى للتزوير ؛
ب هو عرض القرص.
الشكل 1.2 - متغير الاحتكاك الأمامي:
أ) من عجلة التوجيه ؛ ب) من محرك الأقراص
يتمثل النقص الرئيسي في المتغيرات الأمامية في عملية تزوير هندسية كبيرة ، والتي يجب أن يتم تبادلها في عمليات نقل الطاقة الخاصة بمدى تنظيمها لنسبة النقل.
باستخدام عجلة سلكية ، يتم تعيين نصف القطر للصيغة التالية:
خلال تصميم rozrahunka قبول:
معامل مخزون zcheplennya ؛
الحد الأدنى لنصف قطر العمل للقرص.
أسطح العمل لعجلات الاحتكاك الفولاذية مصقولة بقصر Ra 0.63 ... 0.32 ميكرون.
من أجل الهروب من التزوير الوبائي ، لم يتم تتبع الجزء المركزي من القرص.
يجب أن يتم تنفيذ Razrahunok على جهد التلامس على الحد الأدنى لقطر القرص ، عندما تكون هناك حاجة إلى أكبر قوة ضغط ويصل التزوير إلى أكبر قيمة.
الشكل 1.3 - مرفقات الدفع: أ) المسمار ؛ ب) كولكوف
2 البيانات الأسبوعية
من الضروري فتح ناقل الاحتكاك الأمامي لقيادة ناقل الخط للعقل ، بحيث تنقل العجلة السلكية التوتر P = 2 كيلو واط للسرعة القصوى ω1 = 90 راد / ث إلى العجلة المدفوعة ، والتي تلتف مع السرعة القصوى ω2max = 45 راديان / ثانية.
كمرفق إمساك ، نختار مرفقًا ملولبًا ، والذي سيؤمن قوة الإمساك الدائمة.
تم تخصيص مادة العجلة: الأصغر هو PTK textolite ، والأكبر من الصلب 45.
نحن نقبل نطاق تنظيم نسبة النقل
الإرسال يرجع إلى الصيغة:
عزم الدوران Mn ، والذي ينتقل بواسطة عجلة القيادة
من أجل نقل الضيق المعين ، المعبر عنه بالقوة المحيطية ، من الضروري تأمين العقل بقوة عن طريق الاحتكاك بين القطط.
de β هو معامل مخزون السلاسل ، β = 1.3.
تدل لحظة الخسارة بالصيغة التالية:
3 تصميم تصميم مغير الاحتكاك
عن طريق الاتصال الجهد
يعتبر القطر d1 للعجلة الأصغر أمرًا مهمًا من عقل مادة التلامس. يتم أخذ معامل مخزون zchelennya ، β = 1.3 ؛ معامل فقدان أطول خط اتصال f = 0.3 ؛ ضغط التلامس المسموح به (نسيج على الفولاذ) [] k = 70 نيوتن / مم 2 ، معامل المرونة للعجلة الأصغر (منسوجات) E1 = 6x103 ميجا باسكال ، للعجلة الأكبر (الصلب) E2 = 2.15x105 ميجا باسكال.
إرشاد معامل المرونة E للصيغة التالية:
نطاق التعديل:
في تصميم rozrahunka قبول
من الناحية الهيكلية ، أقصى قطر للقرص:
تزوير هندسي بعجلة قيادة:
Іnshі razmіri kolіs priymayut بشكل بناء.
4 تطوير نموذج ديناميكي
4.1 رسم تخطيطي للكائن
يتكون هذا النظام من محرك كهربائي ، والذي يُنشئ لحظة المحرك Mn ، والقابض ، وعجلة القيادة ، والقرص المُدار ، والمحامل ، وجسم العمل. يخلق المحرك لحظة للدوران ، مع قطب ، والذي ينتقل عبر القابض على عجلة سلكية ، من قرص توجيه جديد ، ثم إلى جسم عامل (الشكل 3.1). يضمن الملحق اللولبي انتقال اللحظة بالدوران.
الشكل 4.1 - مخطط روزراهون لمحرك الأقراص.
4.2 تحليل البدلات المقبولة لساعة إنشاء النموذج
لتجميع النموذج ، نأخذ محركًا كهربائيًا ، والذي يضمن اللحظة الثابتة ، والتي تدور ، ويفشل z η = 0.98 ، ومحامل كروية η = 0.99 ومحامل أسطوانية z η = 0.97. لا تتضرر تشوهات العجلة والقرص.
الشكل 4.2 - نموذج الإرسال الأمامي
4.3 نموذج ديناميكي
يمكن أن يحتوي النموذج على 4 درجات من الحرية ويتم وصف ruh tіl الذي يدخل النموذج من خلال نظام المساواة التفاضلية ، على أساس النتائج المأخوذة من المعلمات الديناميكية للمحرك. يمكن رؤية نظام المساواة التفاضلية:
de Is، Ip - لحظات تحريض من القصور الذاتي لأجزاء المحرك وجسم العمل الملفوفين ؛
I1 ، I2 - تحريض لحظة القصور الذاتي للعجلة والقرص بطريقة صحيحة ؛
s و p و i هي إحداثيات قمة الكتل التي تلتف حولها ؛
Мn - لحظة القوى المحركة (dvigun) ؛
Mo - لحظة قوى الدعم (لجسم العمل) ؛
c1 ، c2 - صلابة الأعمدة ؛
k1 ، k2 - معامل التخميد ؛
ε - تزوير هندسي.
ثلاثة خطوط تفاضلية ، تصف سلوك المحرك في العملية الروبوتية ، تتكون من نموذج ديناميكي. Dali vykonuєmo doslіdzhennya نموذج مطوي. تم تصميم النموذج بحقنة أحادية المرحلة ، والتي يتم حقنها على عمود المحرك.
4.4 تعيين خصائص القصور الذاتي للركلفي
أجزاء وصلابة عناصر القيادة
لحظات من القصور الذاتي في الساقين ، والتي تلتف حولها ، تدل على مسار المسبحة. لحظة إرشاد من القصور الذاتي لأجزاء المحرك ، والتي يتم لفها:
لحظة إرشاد من القصور الذاتي لأجزاء جسم العمل الملفوفة:
لحظة التوجيه من القصور الذاتي للعجلة:
لحظة التوجيه من القصور الذاتي للقرص:
صلابة Razrahuemo للأعمدة:
معامل الربيع من النوع الثاني (zsuvu) ،
صلابة رمح خدد:
صلابة جوينت:
4.5 تنفيذ نموذج ديناميكي في Simulink
على أساس نظام المعادلات التفاضلية (البند 4.3) لنظام Simulink التفاعلي الإضافي لنمذجة الأنظمة الديناميكية غير الخطية ، نقوم ببناء مخطط لنموذج ديناميكي لمحرك به متغير احتكاك (الشكل 4.3). يرد معنى التغييرات ، كما في مخطط النموذج الديناميكي ، في الجدول 4.1.
الجدول 4.1 - تسميات المتغيرات المنتصرة
في نموذج ديناميكي
| وصف | ميعاد | مخطط | Od. |
| لحظة إرشاد من القصور الذاتي لأجزاء المحرك التي تلتف حولها | يكون | ||
| لحظة إرشاد من الجمود لتفاصيل الجسم العامل ، والتي يتم لفها. | IP | ||
| لحظة التوجيه من القصور الذاتي للعجلة | أنا 1 | ||
| لحظة توجيه من القصور الذاتي للقرص | أنا 2 | ||
| إحداثيات قطع أقنعة التغليف | - | الراديوم | |
| لحظة القوى المحركة (dvigun) | مينيسوتا | N * م | |
| لحظة دعم القوات (هيئة العمل) ؛ | مو | N * م | |
| صلابة العمود خدد | ق 1 | N / م | |
| صلابة جوينت | ج 2 | N / م | |
| عامل التخميد | ك 1 | - | |
| عامل التخميد | ك 2 | - | |
| معامل المخزون | β | ب | - |
| تزوير هندسي | ε | ه | - |
الشكل 4.3 - تنفيذ نموذج ديناميكي في Simulink
بيانات الخروج:
5 تحليل العمليات الديناميكية في الكائن
5.1 تحليل العمليات الديناميكية في منطقة الساعة
من تحليل الرسوم البيانية ، من الواضح أنه من خلال القوة بالقصور الذاتي للأشياء ،
من خلال نوابض القوة والتزوير الهندسي وقوة tertya ، تم تحسين تقسيم النظام. إزاحة القرص خلال الثانية الأولى من برنامج عزم الدوران ، عمود المحرك عمليا يساوي الصفر (الشكل 5.1-5.4).
هذا مستوحى من القوة الربيعية للعمود والمسمار والقوة بالقصور الذاتي للعجلة والقرص ، في لحظة الإطلاق ، يلتف الغلاف ، ثم عندما يتم ضبط اللحظة على الدوران ، ينزلق غلاف القرص في اللحظة.
الشكل 5.1 - عمق القطع لدوران عمود المحرك (راد) لكل ساعة (ساعات)
الشكل 5.2 - سقوط الكوتا على دوران العجلة (راد) في الساعة (ساعات)
الشكل 5.3 - اعتماد كوتا على دوران القرص (راد) لكل ساعة (ساعات)
الشكل 5.4 - استقلال الكوتا عن دوران جسم العمل (راد) في الساعة (ساعات)
5.2 بيانات النموذج الديناميكي
على امتداد المخيمات
يمكن تمثيل النموذج الديناميكي ، الموصوف بواسطة المعادلات التفاضلية ، إما في شكل معادلات مصفوفة (المصفوفات A ، C ، D) أو تقديمه في شكل دالة نقل. نظرًا لأن النموذج قد يحتوي على 4 درجات من الحرية ، فإن تحويل لابلاس ضروري للقضاء على وظيفة نقل العمل بسلاسة. لهذا ، يمكننا تخيل نموذج في شكل مصفوفات ، نظام MATLAB التفاعلي vikoristovuchi їх rozrahunka.
المحاذاة التفاضلية للنموذج الديناميكي:
دعونا نعيد تشكيل النظام.
تخيل نموذجًا في شكل مصفوفة:
دعنا نقدم التعريف التالي:
النموذج الديناميكي يشبه:
دعونا نضرب الأجزاء المصابة من العلاقة بمصفوفة العودة:
مصفوفة الإرجاع لمساعدة MATLAB:
L = ؛
F = [- k1 k1 0 0 ؛ 0-k1 k1 0 ؛ 0 k2-k2 0 ؛ 0 0 k2-k2] ؛
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
اضرب معكوس المصفوفة في المصفوفة:
R = [- c1 c1 0 0 ؛ c1-c1 0 0 ؛ 0 0 -c2 c2 ؛ 0 0 c2-c2] ؛
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
اضرب معكوس المصفوفة في المصفوفة:
ك = ؛
قد تبدو المصفوفات A و B و Z و D كما يلي:
دعنا نقدم طرح المصفوفة في ملف MATLAB M وطرح دالة النقل للنموذج الديناميكي ، من أجل وصف استجابة النموذج للحقن الذي يشبه الخط (الشكل 5.5 ، 5.6).
أ = ؛
ب = ؛
قد تبدو وظيفة النقل كما يلي:
W (s) = (-2.132e-014 s ^ 7 + 16.39 s ^ 6 + 6.586 s ^ 5 + 3.275e004 s ^ 4 - 2343 s ^ 3- 6.166e006s ^ 2 - 7.573e004 s + 1.407es ^ 8 + 1.101 s ^ 7 + 5156 s ^ 6 + 3080 s ^ 5 + 6.401e006 s ^ 4 + 6.915e005 s ^ 3 - 1.742e008 s ^ 2 - 2.015e007 s + 2.25e-007).
الشكل 5.5 - العملية الانتقالية في نموذج ديناميكي
الشكل 5.6 - خصائص الاتساع وتردد الطور وتردد الطور
من تحليل الرسوم البيانية ، يمكن ملاحظة أن التوليد المشترك للنموذج ينمو ولن يتوقف. لذلك ، من الضروري تصميم منظم (تصحيح لانكا) (الشكل 5.7) ، بحيث يكون النموذج الديناميكي صغيرًا ، ويتلاشى أثناء العملية الانتقالية ، وساعة صغيرة من الهدوء (1-5 ثوان) مع تجاوز لا أكثر من 10-15٪.
الشكل 5.7 - نموذج ديناميكي مع وحدة تحكم مشروطة
5.4 تصميم وحدة تحكم مشروط
تعتمد فكرة إنشاء منظم شكلي على حقيقة أنه من الضروري تحديد هذا المعامل بطريقة تتعارض مع قطب الحلقة المغلقة للتنظيم في المنطقة المظللة. من الضروري التأكد من تلاشي القولونية أثناء العملية الانتقالية وساعة قصيرة من الهدوء مع تجاوز لا يزيد عن 10-15٪ (الشكل 5.7).
الشكل 5.8 - مساحة حفر أعمدة أنظمة الصلب
لتشجيع منظم مشروط ، من الضروري إعادة التحقق من التقرن للنموذج.
تتم إعادة التحقق من التقرن وفقًا لمعيار كالمان الإضافي:
إذا كانت رتبة المصفوفة المربعة Ss (n، n) = تساوي ترتيب المصفوفة n ، فإن النموذج الموصوف بواسطة المصفوفات A ، C ، D ، هو Kerovian. ترتيب مصفوفة النموذج الديناميكي أكثر تقدمًا 8.
إن رتبة المصفوفة هي الحجم الأقصى لمصفوفة مربعة ، وإشارتها لا تساوي الصفر.
يمكن تخصيص رتبة المصفوفة لوظيفة إضافية مرتبةفي ماتلاب:
ترتيب المصفوفة A للنموذج الديناميكي يصل إلى الترتيب ، وكذلك نموذج Kerovan.
تقوم طريقة التحديد بتعيين أعمدة لوظيفة نقل جديدة لحلقة مغلقة. للحصول على مساعدة MATLAB ، يمكنك معرفة معامل وحدة التحكم النموذجية وأخذ العملية الانتقالية من النموذج الديناميكي باستخدام وحدة التحكم (الشكل 5.9).
ع = [- 7-0.2i -7 + 0.2i -5-0.5i -5 + 0.5i -5 -6 -17 -10] ؛
sysE = ss (A-B * k، B، C، D) ؛
معامل وحدة التحكم المشروطة:
ك = [- 237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
من تحليل الرسم البياني 5.7 ، يمكن ملاحظة أن العملية الانتقالية للنظام ستنتهي في 2.5 ثانية دون تجاوز الحد.
الشكل 5.9 - العملية الانتقالية لنموذج ديناميكي مع منظم
فيسنوفوك
الروبوتات التي طورت عمليات ديناميكية ، والتي لديها محركات مع متغير الاحتكاك. تم اختيار بيانات المخرجات ، وتصميم تصميم مغير الاحتكاك ، وتم تحديد خصائص القصور الذاتي للأجزاء المتحركة وصلابة عناصر القيادة.
قام Bula بتجميع مخطط كتلة للكائن المراد التحقيق فيه ، وهو وصف رياضي للنموذج الديناميكي الذي يسمح للنظام بتغيير سلوك النظام في حالة حدوث هجوم واحد عليه.
كما تم إجراء تحليل للعمليات الديناميكية في أهداف منطقة المراقبة ومساحات المعسكرات. تصميم وحدة تحكم نموذجية تضمن إتمام العملية الانتقالية لنموذج ديناميكي في 2.5 ثانية.
المؤلفات
1. غوزينكوف ب. تفاصيل الجهاز: Navch. للجامعات. - م: فيش. المدرسة ، 1986. - 359 ص.
2. Bakaev N.A.، Voloshina O.M. أساسيات تصميم تروس الاحتكاك. - عرض تقديمي لجامعة روستوف 1985. - 176 ص.
3. Pronin B.A.، Revkov G.A. Bezstupіnchastі klinopasovі و friktsynі الإرسال. - م: Mashinobuduvannya ، 1980. - 320 ص.
4. كوماروف إم. ديناميات الآليات والآلات. بناء الآلة ، M. ، 1969.
5. إيفانوف أ. اقتران مشجز ، م ، 1959.
صنف 56 أ 55 جم رقم 145832
مجموعة الدفع المسبق M 284
في إيه بيشيكوف
محرك الاحتكاك لآلة الخياطة
ادعى 28 مارس 1961. لـ M 724039/28 Ђ "12 في لجنة حق صانعي النبيذ و vodkrittiv في وزراء الإشعاع في SRSR
تمت ترقية محرك الاحتكاك لآلة الخياطة ، وهو أبسط من حيث التصميم والحقن السالب والمضغوط لقوى القصور الذاتي للحذافة أثناء بدء تشغيل هذا الاهتزاز لآلة الخياطة.
من المفيد قلي العزف على الفرشاة في PoleAє ، بالترتيب ، يدير Scho Vіn قيادة SKIV ، Zemontovaniya لاستكمال Cullete pіdshipnikіv على جسم الآلة باستخدام بكرة بكرة الكابل ، Zovnіshnє Kiltsi є Providnoy Elemang ، يحلق لإحضار البكرات. لف الحلقة الداخلية للمحمل ، مثبتة على عمود رأس الآلة.
يتم تثبيت محامل Kulkov_ (واحد ليرة لبنانية obdva) على جسم الآلة للحصول على جلبة ملولبة إضافية ، مرتبطة بدواسة سكين الآلة.
يوجد على الكرسي تمثيل تخطيطي لكب محرك الاحتكاك.
تم تقوية البكرة 1 (دولاب الموازنة) بقوة على الحلقة الخارجية من محامل ملامسة زاويّة قياسية مخروطية الشكل ، الحلقة الداخلية للمحمل الثامن مثبتة بإحكام على عمود الرأس 4 لآلة الخياطة. الفاصل ب ، المصنوع خصيصًا بدلاً من الفاصل القياسي ، مرتبط بجسم الماكينة أو جزء منه ، ومربوط بإحكام بالجسم ، على سبيل المثال ، مع جلبة محامل ملولبة ، تنقل محور السوسيلا ؛ وإلا ، يتم تثبيت حلقة المحمل 9 ببكرة 1.
بهذه الطريقة ، سيكون محرك الاحتكاك آمنًا عند تشغيل الماكينة ، وستصل السرعة إلى الحد الأقصى للسرعة ، ومن ناحية أخرى ، عند تشغيل اهتزاز الجهاز ، ستكون أقل تساويًا إلى اهتزاز الجهاز من توقف محركات الأقراص.
تخضع لصناعة النبيذ
1. Friczіniy Vіdd Schweinja Machini ، Vіdomiy Tim ، Shah ، scho ، طرق السياق ، يحول Vіn في نفسه إلى مدفع Shkіv ، Zemontovaniy من أجل Culite pіdshipnikіv الإضافي على فيلق آلة z Mozhlivіstea of the محور محور التزامات Kilkoloviy P_DSHIPNIK ، Zovnіshnє Kiltsy عنصر موصل ، يتم دفعه من خلال البكرات ، ويتم تثبيته بجسم الماكينة ، وهو فاصل للتغليف في منتصف حلقة المحمل ، مثبت على العمود الرئيسي لـ الآلة.
2. القيادة للفقرة 1 ، في حالة l و h و y shy tim ، بالنسبة لنظام التشغيل "في حركة البكرة ، تكون الكرات أحدهما أو الآخر - مثبتة على جسم السيارة للحصول على جلبة ملولبة إضافية ، مرتبطة بدواسة القدم
منظم A. V. Nechaikin
تيكريد ت. II. 1 urilko Proofreader V. M. Andrianova
المحرر الخامس ، St Haaova
بواسطة .. ، حتى psch. 1.111-62 ص. شكل بوم. 70 ؛ 108 /. حجم عرض 0.18. ل.
زاك. 2709 تداول 500 سعر 4 كوب.
TsBT1ch إلى اللجنة على اليمين وعلى الجانب الأيمن من اللجنة
موسكو ، سنتر ، M. Cherkasky prov.، D. 2 / b.
Drukarnі TsBT11 ، موسكو ، بيتريفكا 14
محركات الاحتكاك مع مجموعة واسعة من التنظيم تتبع الدائرة التفاضلية.
محركات الاحتكاك كبيرة الحجم للتركيبات التجريبية.
محرك الاحتكاك ستبليس من سفيتلوزاروف.
أسس محرك الاحتكاك Rozrahunok على المحلول ، otrimanuyu schee Euler لخيط gnuchkoi giuchkoi. بعد أن أساءوا إلى امرأة ، واحدة ، واحدة ونفس الشيء ، نظروا إلى بعضهم البعض في نفس الوقت في كتلة بها مجموعة من الخيط ، والتي يمكن أن تكون نابضة بالحياة.
يتم تحديد كفاءة محرك الاحتكاك بواسطة معامل الجر.
في محركات الاحتكاك ، يتم نقل قوة الجر إلى عضو مرن (غرزة ، حبل ، رمح) عن طريق فرك عنصر القيادة بالقوة. محرك الاحتكاك zastosovuyut للخطوط والحبال ، هو أكثر أهمية - للسرطان.
| تغيير الرسومات. |
مع وجود محرك احتكاك على قطعة خبز ، يكون التوتر ضروريًا ، باستثناء التعيين المحدد بالفعل ، بالإضافة إلى رتبة الرأس ، لإنشاء قوة كافية لاقتران عنصر الجر مع حافة وحدة القيادة. في هذه الحالة ، يتم تحديد قيمة yogo بواسطة قيمة قوة الجر ومعلمات محرك الأقراص.
يتم ضمان التشغيل العادي لمحركات الاحتكاك من خلال لفات مرفقات الشد المُركَّبة (تقسيم الفصل. في الناقلات القصيرة الثابتة (حتى 60 مترًا) ، والناقلات المتعرجة والقابلة للسحب والمحمولة ، يتم تثبيت مرفقات الشد الميكانيكي.
تم تجهيز Mlins مع محرك الاحتكاك (Sh-25 ، Sh-70) ببكرتي قيادة واثنين من بكرات الدعم بزيت بلاستيكي.