A sewing electric drive, whether it be a industrial machine, may not only have a different design for adjusting the speed (friction), but another electrical circuit, the principle of operation of an electric motor.
Some models of electric drives may have low power consumption from 40 to 110 W, low speed wrapping and asynchronous type of robotic motor. In other words, the pobutovy electric motor does not show the great and trivial innovations and vimagaє periodic "repairing". The sewing engine of the industrial machine can be operated without interruption, without overheating and without wasting heat.
If you need a machine for bulk sewing, then just think about a good drive. Behind the goloshennyami you can buy inexpensively used tables from engines of the Radyansky release. Tse nadіynі and pratsezdatnі elektroprivodі and it is possible for you to win the following. Ale vrahuyte, scho all the stench work even louder, and no regulation of the noise will not be lost. Therefore, we recommend that you bring it in good time, for example, steel and lead, which are included in the kit to the Typical sewing machine. I myself such a sewing electric drive is reportedly reviewed in this article.

You can buy a sewing electric drive from the Typical company and install it on any kind of industrial style, but it’s better to bathe yoga in a set with a table, more often the style itself is cheaper for a dvigun.
By the way, a handy sewing steel can be bought for a custom sewing machine. Zruchny expanse of steel, and at the same time, rozkrіyny sewing steel to make your work comfortable, which obov'yazkovo signify on the mood and is viable to the level of work. Even if you have the opportunity to sew a lot, do not be fooled by such "dribnitsy".

Navit such an insignificant detail as a vimikach to the electric drive creates comfort in the robot and infuses into the mood.
The tension of the electric motor and the voltage of the
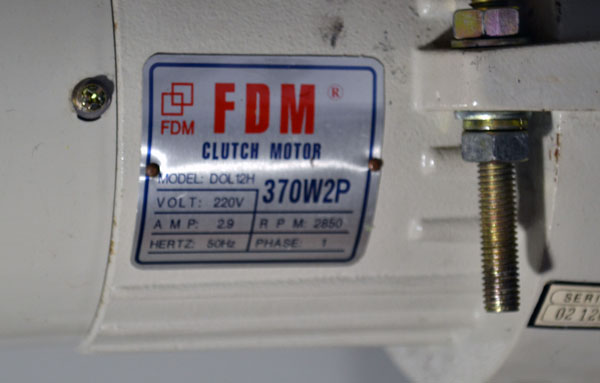
On the front side of the engine there is a tag indicating the tension of the gauge and the tightness of the engine.
If you choose to install a car at home or in a small studio, de there is no 380 volt socket, choose an electric motor for a robot with 220 volts.
And the tightness of the engine this butt can not be of particular importance, the oskolki shvidk_st of robots and machines lie in other factors. Let's talk about them a troch below.
What is a friction drive? If you are driving a car, then you are responsible for knowing that such a connection. So the axis of the friction of the sewing electric drive is similar.
The motor wraps around gradually with the very swidkistyu. When pressing on the pedal, the disc of the friction attachment (Ferado) with textolite pads goes up to the flywheel of the engine and interacts with it. The more you press the friction disc to the flywheel of the electric motor, the better the coupling and the greater the speed. To that, sometimes in dry work, the smell of singed textolite appears on the regular swidth.
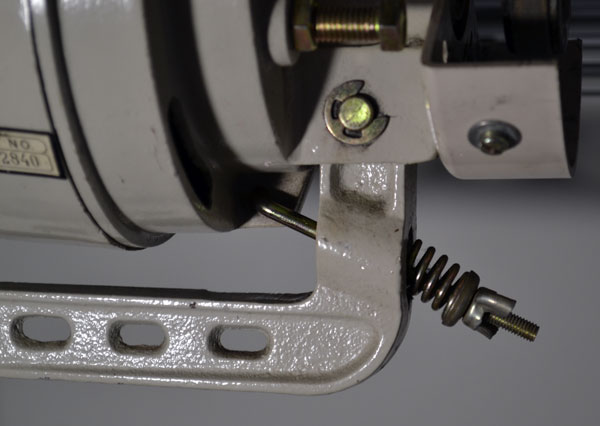
Freewheel steps (without susilla) of the pedal to the drive are regulated by a screw.
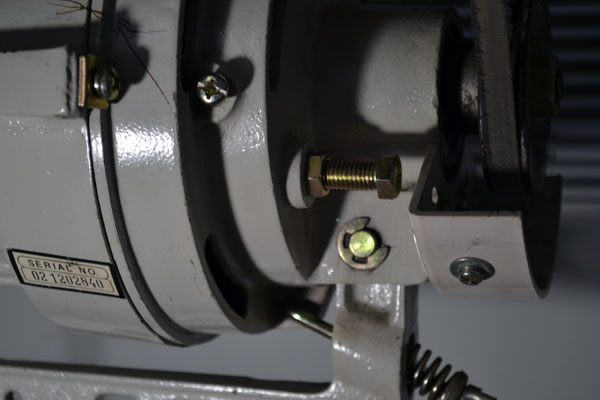
And the axis is with twin screws, more precisely, two screws (z salutary side one more) galma is regulated. So, the very galma mayzhe is like a car.
If you work on high swedishness, then after the teeth of a sewing machine, for inertia, you will continue to wrap. That needs a galmo, as if to sound like an already inappropriate wrapping. The axis of the cim is a screw with a lock nut and the sharpness step of the galm is regulated.
We did not post a photo of the friction clutch of the engine, the repair of the engine is the responsibility of the electrician, but it is necessary to adjust the robot with your own hands.
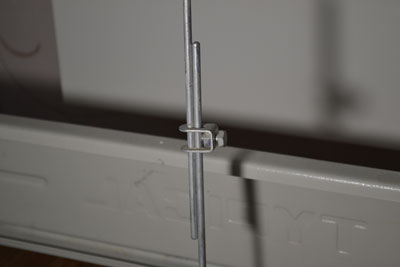
It is better to adjust the height of the pіdёm chi kut nakhil of the pedal here.
Vіd chto lay the swedkіst of the robotic industrial sewing machine

The speed of the robot and the industrial sewing machine should be deposited with us in front of the number of wraps of the electric motor. This parameter can be found on the exchanger or on the passport of the drive. But such details are less likely to be scratched by specialists in factory sewing. For other machines, this parameter of the robotic motor is different, the gear shifts are another way to regulate the speed of the robotic sewing machine.

And for help itself, change the pulley of the engine. The larger the diameter of the pulley, the more limited the speed of the robotic sewing machine.
It is not easy to change the pulleys, for which a key is needed for 19 and the pulley itself, which sound is given to the engine. Ale, wait, if you happen to adjust the length of the drive belt, and if you have a lot of fluctuations, you may have a smaller diameter.

What a good pronunciation brought, such a modern, may be noiseless and beautiful like a Typical company, but don’t need it. Tse vіdnositsya to shvachok-homework. Stinks are often practiced at home on industrial sewing machines, such as class 1022, class 97. For three different reasons, but in the first place, the noise of the robot and the stench cannot beat them.
To solve this problem easily and inexpensively, buy a TUR-2 electric drive and install it directly on the body of the industrial machine. It’s not possible to explain how to install it, at the skin’s point of view it is possible to beat your own decision. And we can also make, if necessary, replace the plug and solder the rods, as shown in the photo.
In addition, if such a motor has to solder the position of the windings with mists, the motor will be wrapped in another day. You will be happy when you are connected to such an overlock drive.
But all the same, for the sake of recognition only for electricians, it is not recommended for fans of ukraine to independently pick up engines, and, for that matter, there should be no more minyat, soldering. I’m not only directly unsafe from a strum attack, but I’m hooked. Vaughn manifests itself in a trival hour. In case of overheating of the windings of the engine, wind it up at the non-working station of the sewing machine, but it can be connected to the edge of the windings.
Other brands of electric motors can also be installed on industrial machines, but we recommend only those that have been reviewed by us, and the TUR-2 electric drive itself.
And don't forget that the speed of the robotic typewriter is significantly reduced and sewing on it can be short-lived, the big breaks (pauses).
Sometimes you need to find a sewing machine, more precisely, remove the plastic case of the machine in order to gain access to other knots. Such a need to blame is even more rare and blame it only if it is necessary to replace the electric motor of the sewing machine and the drive belt. Vtіm, to replace the electric drive, sometimes remove the bottom cover. And the axis should be "jammed", you will have to pick up the machine again.
In this article, you know how to know the cause of the failure of the electric drive, as well as how to independently replace the electric motor.
Sound the problems of the sewing electric drive are caused by the pedals, not the electric motor. It is not recommended to independently pick up the pedal. Take care of the pedal, do not twist the darts, do not “stand” on them with a low style and keep in mind that an electric jet with a voltage of 220 volts should pass through these darts.

Hand sewing machine - attachment and repair of the drive
The sewing machine is simply indispensable when sewing other fabrics and navit shkir. And the axis of the manual drive of the flooring is not handy, so there is no bazhanya to beat. However, this situation is easy to correct, if you buy a sewing electric drive at once from the pedal and the drive belt in the kit. The leather electric motor can be mounted on a regular basis, which allows you to install it on a manual sewing machine.
The lower drive of the sewing machine is now a museum exhibit. Make up, knock, that leg is soaked. Before that, the machine often starts spinning in the wrong direction. How to act like a yogo vikoristannya, like a machine Seagull or Podilska you as a whole vlashtovu? You just need to install the sewing electric drive. Fastening for new leather skin Seagull. The electric drive itself is less expensive than a new belt for the foot drive.
The zigzag prefix for a sewing machine is a clever attachment that imitates a zigzag row with a simple straight-row machine of the Podolsk type.
In this article, you know why the machine is looping with a horizontal bar and how to fix the defect in the sewing row with your own hands.
The sewing machine is not sewn, as the flywheel friction washer is incorrectly installed, or the bushings and bushings are rusted after an hour of hard work.
The leather model of the sewing machine has a different set of legs. Report description vykoristannya paws for sewing machines firm Janome.
For work with natural skin, you will need special tools, attachments for installing accessories, adhesives and other applied materials.
Wimogi to drive sewing machines.
Subject: Electric drive for sewing machines.
lecture 7.
On sewing machines, work is carried out in superbly important minds, if the stretch of the year
carry out up to 1000 machine starts. Can you find another technological machine with a similar mode of operation? And the speed of the head shaft is up to 9000 hv -1! A lot of gears don’t show off such swags! Stars and special assistance to the electric drive:
1. Speed - building security on the head shaft of the machine (5 - 6) 10 3 xv -1.
2. Guilty vitrimati up to 1000 vimkneni for a year.
3. Smooth start, smoother regulation of the speed of the machine.
4. Control of the drive - pedal with the limiting force of the pressure on it - 60 N standing and sitting up to 150 N.
5. Mati high K, P, D, (in the shop it becomes superficially smoky in the faceless tight stitching of sewing machines), hand-stitching (do not bother the operator to sit freely), safe for the robot as in the electric, as well as in the mechanical one.
6. Vartist e / drive may be the subject of special discussion. (In electric drives, which are automated, there are over 30 microcircuits, and this variance is equivalent to that of the machine head!)
In the sewing industry, there are mainly three types of electric drives, depending on the type of technological machine:
· Contactors- if by turning the vimikacha or by pressing the pedal, the car immediately picks up the passport speed. It is not necessary for the smoothness of the start-up and the regulation of the speed. Driven to stagnate on quiet, simple machines that rarely flicker (rewinding fabric, dubbing, etc.)
· Friction- if between the asynchronous electric motor and the V-belt transmission, a friction clutch is installed, which operates on the pedal, which ensures a smooth start and smooth adjustment of the speed on the move of the machine. Today may be wider, both on universal and on special machines.
· automation electric drive. Allows you to program the robot of the machine, automatically perform the main and additional operations of the technological cycle. Expensive and foldable, low efficiency. And the trend is to replace yoga, let's forgive the good regulation of the fast paced engine.
On little 5, a block diagram of the friction clutch of the friction electric drive of the sewing machine is given, for which designation:
1. Shaft of asynchronous electric motor,
2. Conductive disk, fastened securely on the end of the shaft, without ring linings, steel,
Reference disc, with ring pads on both sides, made of high-friction wear-resistant material.
Disc fastening on the shaft 6 friction clutch.
3. The disk is galvanized, non-robust, often floating, so that its surface is self-restoring in the disk 3 surface when closed with it.
4. Compressing spring, pushing shaft 6 at once from disk 3, break to the right until it closes with disk 4.
5. Mufti shaft; rough fit with the left ball bearing of the bushing 7 and the right fit.
6. Rukhoma horizontally inner sleeve. Ruhaetsya in the body of the mufti to the right-left hand at once from the shaft 6.
7. V-belt pulley, conductive. On old industrial machines, two pulleys were installed - a smaller one (pos. 9 is not shown) - for running in a new or old machine for repair; reached a reduction in the speed of the car by 25%.
10. Roller at the groove of the loose bushing.
11. Two-shouldered importance.
12. Thrust regulated dozhini.
13. Start pedal.
14. Mufti case, which is folded in two parts (not shown in the diagram below).
fifteen . Promsteel machines.
16. A plate, until the body of the muff at the assembly is hinged from below. At sharnirі - the last gvint; serve for fixing the coupling body in the required position for the correct tightness of the V-belt transmission.
Donetsk National Technical University
Job Qualification
On the topic:
Development of a dynamic model for a drive with a friction variator
Vikonav:
Student gr. MS-03n: Kasatka P.O.
Kerivnik: Derkach O.V.
Consultant: Gorobets I.O.
DONETSK 2007
ESSAY
Bachelor's work: 38 pages, 15 small books, 1 supplement, 1 table, 5 dzherel.
For this bachelor's robot, it is necessary to develop a dynamic model for the drive, in order to avenge the friction variator; add up the differential equations that describe the dynamic processes of the drive.
Follow-up object: driven by a friction variator.
Meta work: it is necessary to develop a dynamic model for the drive to replace the friction variator, with the help of the MatLab Simulink software package, to ensure the necessary parameters of the transitional process.
frictional variator, transitional process, differential alignment, dynamic model, geometrical coupling, moment of inertia
Entry
1 Zagalni vіdomostі about friction variators
2 Weekly data
3 Design design of the friction variator behind the contact voltage
4 Development of a dynamic model
4.1 Structural diagram of the object and process in the new
4.2 Analysis of allowances and factors that are taken into account in the matching model
4.3 Dynamic model
4.4 Designation of inertia characteristics of moving parts and hardness of drive elements
4.5 Implementation of a dynamic model in Simulink
5 Analysis of dynamic processes in the object
5.1 Analysis of dynamic processes in the clock area
5.2 Submission of a dynamic model near the space of the stations
5.3 Modal controller design
Visnovok
Perelik posilan
addendum
Entry
Most modern machines and installations are created according to the scheme: dvigun - transmission - working organ (vykonavchiy mekhanizm). Necessity for the transfer of an intermediate link between the engine and the working bodies of the machine is connected with the tasks of increasing productivity, tobto. zbіlshennya їhnёї shvidkodії.
The hour of frictional gear shifting enters the main hour of the working cycle of the machine, which also adds to the productivity of the machine in a flash. The problem of increasing productivity is directly related to the development of methods for dynamic follow-up of machines and the choice of their optimal parameters and structure.
For an additional dynamic model, an analysis of the system is carried out, without the participation of a real object, and on this basis, it is possible to induce a control system for the object, that postulate the behavior of the control system of that object.
1 General information about friction variators
Friction is called the transmission, the robot is based on the victorious forces of rubbing, which is blamed on the contact of two bodies of wrapping under the force of the pressing force Q.
The friction gears of the wraparound hand can be divided into two main groups: the gears are unregulated, that is. with mentally fast gear ratios, that gear regulation that allows you to smoothly change the gear ratio (stepless regulation) (Fig. 1.1).
One of the simplest and in the richest swings is to complete the superficial friction gear, which is folded into the simplest swing of two wheels (kotkiv), fixed on the driving drive shafts. To transfer the movement without forging, it is necessary to add a force Q to one wheel, which is sufficient for rubbing in the contact area, with which the power of the chain is stronger than the size of the circumferential susilla that is being transmitted.
Figure 1.1 - Frontal friction variator
The advantages of friction gears are: smoothness and noiselessness of the robot, simplicity of design, impossibility of breakage during sharp change torque on one of the shafts of the wind, the ability to lick the kotkіv, the ability to steplessly adjust the speed on the go, without a gear gear.
Nedolіkami є: the need for a close-fitting attachment, a great grip on the shaft that support in the divinity of the strength of the close-fitting attachment, which will increase their size and make the transmission bulky, and also measure the amount of tightness that is transmitted; sluggishness of transmission through the licking of cats; due to high depreciation.
Friction variators stop both in kinematic and power transmissions in vibrations, if you need stepless speed regulation (gear transmission does not allow such regulation). Frictional variators are used in machine-tools, in liquor machines, industrial and transport machines, drives of lethal devices and metalworking machines, robots and manipulators, digital quilting systems, mechanisms for the power of the state and other types.
The value of frictional variators as stepless regulators and speed increase in connection with a wide front works from the automation of control of vibrational processes.
One of the forgings of the friction variator is made from yakish steels (40, 50, ShKh15, etc.), and the other one is made from gray chavun, textolite, fiber and other plastics.
Three types of frictionless gears with solid bodies torsional frontal frictional variators are the simplest constructively. With such a variator, it is possible to move the wheel along the shaft in straight lines, indicated by arrows, with which gear, the shift smoothly changes to a change in the working diameter of the disk.
The geometric forging of the variator is determined by the formula:
"+" sign - for the drive wheel, "-" sign - for the drive disk (Figure 1.2 i b),
de - the radius of the disk, at the maximum forging;
b is the width of the disk.
Figure 1.2 - Frontal friction variator:
a) from a guide wheel; b) from the drive
The main shortfall of the frontal variators is a large geometric forging, which in the power transmissions of their range of regulation of the transmission ratio must be interchanged.
With a wired wheel, the radius is assigned to the following formula:
During the design rozrahunka accept:
Coefficient of the stock of zcheplennya;
Minimum working radius of the disk.
The working surfaces of steel friction wheels are polished with a shortness of Ra 0.63...0.32 microns.
In order to hide the epidemiological forging, the central part of the disc was not traced.
Razrahunok on the contact voltage should be carried out on the minimum diameter of the disk, when the greatest pressing force is required and the forging reaches the greatest value.
Figure 1.3 - Push attachments: a) screw; b) kulkove
2 Weekly data
It is necessary to open the frontal frictional transmission for the drive of the streak conveyor for the mind that the wire wheel transmits the tension P = 2 kW for the top speed ω1 = 90 rad / s to the driven wheel, which wraps with the top speed ω2max = 45 rad / s.
As a gripping attachment, we choose a screwed attachment attachment, which will secure the permanent gripping force.
The material of the wheels is assigned: the smaller one is PTK textolite, and the larger one is steel 45.
We accept the range of regulation of the transfer ratio
The transmission is due to the formula:
Torque moment Mn, which is transmitted by the drive wheel
In order to transfer the given tightness, expressed by circumferential force, it is necessary to secure the mind de force by rubbing between the cats.
de β is the coefficient of the stock of chains, β=1.3.
The moment of loosing is signified by the following formula:
3 Design design of the friction variator
by contact voltage
The diameter d1 of the smaller wheel is significant from the mind of the contact material. The coefficient of the stock of zchelennya is taken, β = 1.3; coefficient of loss of the length of the contact line f=0.3; permissible contact pressure (textolite on steel) [σ]k = 70 N/mm2, modulus of elasticity for the smaller wheel (textolite) E1=6x103 MPa, for the larger wheel (steel) E2 = 2.15x105 MPa.
Guiding the modulus of elasticity E for the following formula:
Adjustment range:
At the design rozrahunka accept
Structurally, the maximum diameter of the disk:
Geometric forging with a driving wheel:
Іnshі razmіri kolіs priymayut constructively.
4 Development of a dynamic model
4.1 Block diagram of the object
This system consists of an electric motor, which creates the moment of the Mn motor, clutch, drive wheel, driven disk, bearings and working body. The engine creates a moment to turn, with a swivel joint ω, which is transmitted through a clutch on a wired wheel, from a new guidance disk, then to a working body (Fig. 3.1). A screw-on attachment ensures the transmission of the moment to turn.
Figure 4.1 - Rozrahun's scheme for the drive.
4.2 Analysis of the allowances that are accepted for the hour of the creation of the model
To assemble the model, we take an electric motor, which ensures the constant moment, which to turn, muffs z η = 0.98, ball bearings η = 0.99 and roller bearings z η = 0.97. Deformations of the wheel and disk are not damaged.
Figure 4.2 - Frontal transmission model
4.3 Dynamic model
The model can have 4 degrees of freedom and the ruh tіl that enters the model is described by a system of differential equalities, on the basis of the results, which is taken from the dynamic parameters of the drive. The system of differential equalities can be seen:
de Is, Ip - induction moments of inertia of the parts of the engine and the working body that are wrapped;
I1, I2 – induction of the moment of inertia of the wheel and disk in a correct manner;
φs, φp, φi are the apex coordinates of the masses that wrap around;
Мn - moment of driving forces (dvigun);
Mo - the moment of forces of the support (of the working body);
c1, c2 - hardness of shafts;
k1, k2 – damping coefficient;
ε - geometric forging.
Three differential lines, which describe the behavior of the drive in the robotic process, have been composed of a dynamic model. Dali vykonuєmo doslіdzhennya folded model. The model is designed with a single stage injection, which is injected onto the motor shaft.
4.4 Designation of the inertial characteristics of the rukhlivy
parts and hardness of drive elements
Moments of inertia of the legs, which wrap around, signify a rosary path. Guidance moment of inertia of the engine parts, which are wrapped:
Guidance moment of inertia of the parts of the working body that are wrapped:
Guidance moment of inertia of the wheel:
Guidance moment of inertia of the disk:
Razrahuemo hardness of shafts:
de - spring modulus of the 2nd kind (zsuvu),
Hardness of the splined shaft:
Hardness of gwent:
4.5 Implementation of a dynamic model in Simulink
On the basis of the system of differential equations (clause 4.3) for the additional interactive Simulink system for modeling non-linear dynamic systems, we build a diagram of a dynamic model for a drive with a friction variator (Fig. 4.3). The meaning of the changes, as in the scheme of the dynamic model, is given in Table 4.1.
Table 4.1 - Designations of the changeables that are victorious
in a dynamic model
| Description | Appointment | Scheme | Od. |
| Guidance moment of inertia of the engine parts that wrap around | Is | ||
| Guidance moment of inertia of the details of the working body, which are wrapped. | IP | ||
| Guidance moment of inertia of the wheel | I1 | ||
| Guidance moment of inertia of the disk | I2 | ||
| Cutoff coordinates of wrapping masks | - | radium | |
| Moment of driving forces (dvigun) | Mn | N*m | |
| Moment of forces support (working body); | Mo | N*m | |
| Hardness of the splined shaft | s 1 | N/m | |
| Hardness of gwent | c2 | N/m | |
| damping factor | k1 | - | |
| damping factor | k2 | - | |
| Coefficient of stock | β | b | - |
| geometric forging | ε | e | - |
Figure 4.3 - Implementation of a dynamic model in Simulink
Exit data:
5 Analysis of dynamic processes in the object
5.1 Analysis of dynamic processes in the clock area
From the analysis of the graphs, it is clear that through the inertial power of objects,
through the springs of power, geometric forging and the strength of the tertya, the system's splitting up is improved. Displacement of the disk during the first second of the torque program, the motor shaft is practically equal to zero (Fig. 5.1-5.4).
This is inspired by the spring power of the shaft and the screw and the inertial power of the wheel and the disk, at the moment of launch, the wrapper wraps up, then when the moment is adjusted to turn, the disk wrapper is slipped at the moment.
Figure 5.1 - Depth of the cut to the rotation of the motor shaft (rad) per hour (s)
Figure 5.2 - The fall of the kuta to the turn of the wheel (rad) per hour (s)
Figure 5.3 - The fall of the kuta to the rotation of the disk (rad) per hour (s)
Figure 5.4 - Independence of the kuta to the rotation of the working body (rad) per hour (s)
5.2 Dynamic model data
at the expanse of camps
A dynamic model, described by differential equations, can either be represented in the form of matrix equations (matrices A, C, D) or presented in the form of a transfer function. Since the model may have 4 degrees of freedom, then the transformation of Laplace is necessary to eliminate the transmission function of the work smoothly. To this, we can imagine a model in the form of matrices, vikoristovuchi їх rozrahunka іinteractive system MATLAB.
Differential alignment of the dynamic model:
Let's remake the system.
Imagine a model in a matrix form:
Let's introduce the following definition:
The dynamic model looks like:
Let's multiply the hurt parts of the relationship to the return matrix:
Return matrix for MATLAB help:
L=;
F=[-k1 k1 0 0; 0-k1 k1 0; 0 k2-k2 0; 0 0 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Multiply the inverse matrix by the matrix:
R=[-c1 c1 0 0; c1-c1 0 0; 0 0 -c2 c2; 0 0 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Multiply the inverse matrix by the matrix:
K=;
Matrices A, B, Z, D may look like:
Let's introduce the subtracting of the matrix in the MATLAB M-file and subtracting the transfer function of the dynamic model, in order to describe the response of the model to the streak-like injection (Fig. 5.5, 5.6).
A=;
B=;
The transfer function may look like:
W(s) = (-2.132e-014 s^7 + 16.39 s^6 + 6.586 s^5 + 3.275e004 s^4 - 2343 s^3- 6.166e006s^2 - 7.573e004 s + 1.407e s^8 + 1.101 s^7 + 5156 s^6 + 3080 s^5 + 6.401e006 s^4 + 6.915e005 s^3 - 1.742e008 s^2 - 2.015e007 s + 2.25e-007).
Figure 5.5 - Transitional process in a dynamic model
Figure 5.6 - Amplitude-phase-frequency and phase-frequency characteristics
From the analysis of the graphs, it can be seen that the cogeneration of the model grows and won't stop. Therefore, it is necessary to design a regulator (correcting lanka) (Fig. 5.7), so that the dynamic model is small, fading out during the transitional process, a small hour of calm (1-5 seconds) with overshoot of no more than 10-15%.
Figure 5.7 - Dynamic model with modal controller
5.4 Modal controller design
The idea of creating a modal regulator is based on the fact that it is necessary to select this coefficient in such a way that the pole of the closed loop of the regulation opposes in the shaded area. It is necessary to ensure the fading coli during the transitional process and a short hour of calm with an overshoot of no more than 10-15% (Fig. 5.7).
Figure 5.8 - The area of \u200b\u200bgrooving the poles of steel systems
To encourage a modal regulator, it is necessary to re-verify the keratinization of the model.
Re-verification of keratinization is carried out according to the additional criterion of Kalman:
If the rank of the square matrix Ss(n,n)= is equal to the order of the matrix n, then the model, which is described by the matrices A,, C, D, is Kerovian. The order of the matrix of the dynamic model is more advanced 8.
The rank of a matrix is the maximum size of a square matrix, the sign of which is not equal to zero.
The rank of the matrix can be assigned to an additional function rank in MATLAB:
The rank of the matrix A of the dynamic model is up to the order, also the Kerovan model.
The selection method assigns poles for a new transfer function of a closed loop. For the help of MATLAB, you can know the coefficient of the modal controller and take the transitional process from the dynamic model with the controller (Fig. 5.9).
p=[-7-0.2i -7+0.2i -5-0.5i -5+0.5i -5 -6 -17 -10];
sysE=ss(A-B*k,B,C,D);
Coefficient of modal controller:
k=[-237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
From the analysis of graph 5.7, it can be seen that the transitional process of the system will end in 2.5 seconds without overshooting.
Figure 5.9 - Transitional process for a dynamic model with a regulator
Visnovok
Which robots have developed dynamic processes, which have drives with a friction variator. The output data were selected, the design design of the friction variator was adjusted, the inertial characteristics of the moving parts and the hardness of the drive elements were determined.
Bula has compiled a block diagram of the object to be investigated, a mathematical description of the dynamic model that allows the system to change the behavior of the system in the event of a single attack on it.
Also, an analysis of dynamic processes in the objects of the watch area and the expanses of the camps was carried out. Designing a modal controller, which ensures the completion of the transitional process of a dynamic model in 2.5 seconds.
Literature
1. Guzenkov P.G. Machine details: Navch. for universities. - M.: Vishch. school, 1986. - 359 p.
2. Bakaev N.A., Voloshina O.M. Fundamentals of the design of friction gears. - Presentation of the Rostov University, 1985. - 176 p.
3. Pronin B.A., Revkov G.A. Bezstupіnchastі klinopasovі and friktsіynі transmissions. - M.: Mashinobuduvannya, 1980. - 320 p.
4. Komarov M.S. Dynamics of mechanisms and machines. Machine-building, M., 1969.
5. Ivanov E.A. Couplings Mashgiz, M, 1959.
Class 56a, 55 g No. 145832
Prepaid group M 284
V. A. Pishchikov
FRICTION DRIVE OF THE SEWING MACHINE
Claimed 28 March 1961. for M 724039/28 вЂ" 12 at the Committee on the right of winemakers and vodkrittiv at the Radiation Ministers of the SRSR
The friction drive of the sewing machine is promoted, which is simpler for its construction and compact and usuvaє negative injection of the forces of inertia of the flywheel during the start-up of that vibration of the sewing machine.
Конструктивна особливість фрикційного приводу полягає в тому, що він включає приводний шків, змонтований за допомогою кулькових підшипників на корпусі машини з можливістю осьового переміщення і забезпечений конічним роликовим підшипником, зовнішнє кільце якого є провідним елеменгом, що приводить через ролики і закріплений на корпусі машин. wrapping the inner ring of the bearing, fixed to the head shaft of the machine.
Kulkov_ bearings (one lp obdva) are mounted on the body of the machine for an additional threaded bushing, tied to the pedal of the machine's knife.
On the armchair, there is a schematic representation of the pronation of the frictional drive.
Pulley 1 (flywheel) is firmly strengthened on the outer ring of 2 conical standard roller angular contact bearings, the inner ring of the 8th bearing is firmly fixed on the head shaft 4 of the sewing machine. Separator b, specially made instead of a standard one, bonded with the machine body or a part, zhorstko tied with the body, for example, with a threaded bearing bushing , which transmits the axis of the susilla; otherwise the bearing ring 9 is fastened with a pulley 1.
In this way, the frictional drive will be safe when the machine is turned on, the speed will be up to the maximum speed and, on the other hand, when the hour of the machine’s vibration is turned on, it will be the least equal to the vibration of the machine from the stoppage of the drives.
Subject to winemaking
1. Фрикційний привід швейної машини, відомий тим, що, з метою спрощення конструкції і досягнення високої компактності, він включає в себе приводний шків, змонтований за допомогою кулькових підшипників на корпусі машини з можливістю осьового переміщення і забезпечений конічним роликовим підшипником, зовнішнє кільце якого є a conductive element, which is driven through the rollers, and fastened to the machine body, a separator for wrapping in the middle of the bearing ring, fixed to the main shaft of the machine.
2. Drive for paragraph 1, in the case of l and h and y shy tim, for the OS “in the movement of the pulley, the ball bearings are one or the other - mounted on the car body for an additional threaded bushing, tied to the foot pedal
Orderly A. V. Nechaikin
Techred T. II. 1 urilko Proofreader V. M. Andrianova
Editor V, St Haaova
By .., until psch. 1.111-62 r. Boom format. 70; 108/,. Volume 0.18 view. l.
Zach. 2709 Circulation 500 Price 4 kop.
TsBT1ch To the Committee on the right and on the right side of the committee
Moscow, Center, M. Cherkasky prov., D. 2/b.
Drukarnі TsBT11, Moscow, Petrivka, 14
Friction drives with a wide range of regulation follow the differential circuit.
Friction drives are oversized for experimental installations.
Stepless friction drive of Svіtlozarov.
Rozrahunok friction drive foundations on the solution, otrimanuyu schee Euler for the gnuchkoi giuchkoi thread. Having offended a woman, one and the same, one and the same, they looked at each other at the same time in a block with a bunch of thread, which can be springy.
The efficiency of the friction drive is determined by the traction coefficient.
In friction drives, the traction force is transferred to a flexible organ (stitch, rope, lance) by force rubbing the drive element. The frictional drive zastosovuyut for lines and ropes, it is more important - for lancers.
| Change graphics. |
With a frictional drive on the cob, the tension is necessary, except for the already designated designation, as well as the head rank, for the creation of a sufficient force of the coupling of the traction element with the rim of the drive unit. In this case, the value of yogo is determined by the value of the traction force and the parameters of the drive.
The normal operation of the friction drives is ensured by the windings of the installed tensioning attachments (div. Ch. On short stationary (up to 60 m), reeling, retractable and portable conveyors, the mechanical tensioning attachments are installed.
Mlins with friction drive (Sh-25, Sh-70) have two drive rollers and two support rollers with plastic oil.