Un accionamiento eléctrico de costura, ya sea una máquina industrial, puede no solo tener un diseño diferente para ajustar la velocidad (fricción), sino otro circuito eléctrico, el principio de funcionamiento de un motor eléctrico.
Algunos modelos de accionamientos eléctricos pueden tener un bajo consumo de energía de 40 a 110 W, envoltura de baja velocidad y tipo de motor robótico asíncrono. En otras palabras, el motor eléctrico pobutovy no muestra las grandes y triviales innovaciones y la "reparación" periódica de vimagaє. El motor de costura de la máquina industrial puede funcionar sin interrupción, sin sobrecalentamiento y sin desperdicio de calor.
Si necesita una máquina para coser a granel, piense en una buena unidad. Detrás del goloshennyami, puede comprar tablas usadas a bajo costo de los motores del lanzamiento de Radyansky. Tse nadіynі y pratsezdatnі elektroprivodі y es posible que ganes lo siguiente. Ale vrahuyte, scho todo el hedor funciona aún más fuerte, y no se perderá ninguna regulación del ruido. Por lo tanto, le recomendamos que lo lleve con tiempo, por ejemplo, acero y plomo, que se incluyen en el kit de la máquina de coser Típica. Según los informes, en este artículo se revisa un accionamiento eléctrico de costura de este tipo.

Puede comprar un motor eléctrico de costura de la compañía Típica e instalarlo en cualquier tipo de estilo industrial, pero es mejor bañar el yoga en un juego con una mesa, más a menudo el estilo en sí es más barato para un dvigun.
Por cierto, se puede comprar un práctico acero de coser para una máquina de coser personalizada. Zruchny extensión de acero y, al mismo tiempo, rozkrіyny acero de costura para que su trabajo sea cómodo, lo que obov'yazkovo significa en el estado de ánimo y es viable para el nivel de trabajo. Incluso si tiene la oportunidad de coser mucho, no se deje engañar por tales "dribnitsy".

Navegar un detalle tan insignificante como un vimikach a la unidad eléctrica crea comodidad en el robot y se infunde en el estado de ánimo.
La tensión del motor eléctrico y el voltaje del
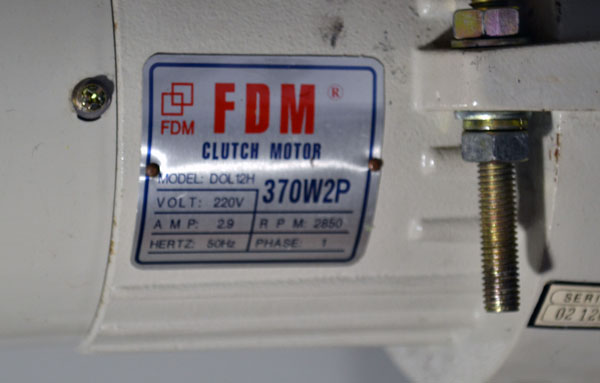
En la parte delantera del motor hay una etiqueta que indica la tensión del manómetro y la estanqueidad del motor.
Si optas por instalar un coche en casa o en un pequeño estudio, si no hay toma de corriente de 380 voltios, elige un motor eléctrico para un robot de 220 voltios.
Y la estanqueidad del motor. este trasero no puede ser de particular importancia, el oskolki shvidk_st de robots y máquinas se encuentran en otros factores. Hablemos de ellos un poco más abajo.
¿Qué es un accionamiento por fricción? Si está conduciendo un automóvil, entonces usted es responsable de saber que existe tal conexión. Entonces, el eje de fricción del accionamiento eléctrico de costura es similar.
El motor se envuelve gradualmente con el mismo swidkistyu. Al presionar el pedal, el disco del accesorio de fricción (Ferado) con almohadillas de textolita sube al volante del motor e interactúa con él. Cuanto más presione el disco de fricción contra el volante del motor eléctrico, mejor será el acoplamiento y mayor la velocidad. A eso, a veces en obra en seco, aparece olor a textolita chamuscada sobre el paño regular.
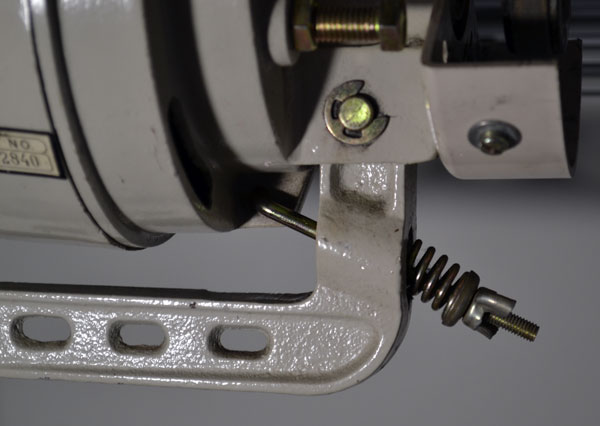
Los pasos de rueda libre (sin susilla) del pedal al accionamiento están regulados por un tornillo.
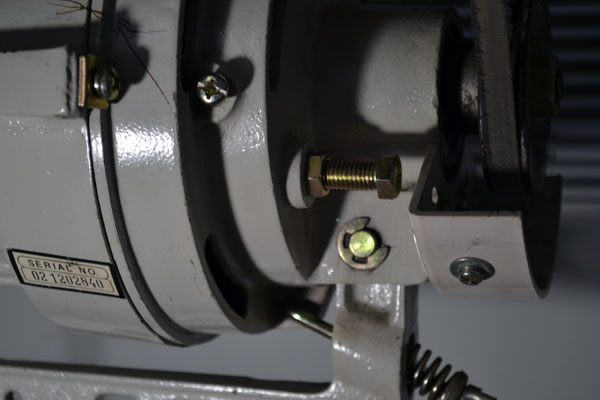
Y el eje es con tornillos gemelos, más precisamente, dos tornillos (z lado saludable uno más) se regula galma. Entonces, la misma galma mayzhe es como un automóvil.
Si trabaja con un alto nivel de sueco, luego de los dientes de la máquina de coser, por inercia, continuará envolviendo. Eso necesita un galmo, como para sonar como un envoltorio ya inapropiado. El eje de la cim es un tornillo con contratuerca y se regula el paso de afilado de la galma.
No publicamos una foto del embrague de fricción del motor, la reparación del motor es responsabilidad del electricista, pero es necesario ajustar el robot con sus propias manos.
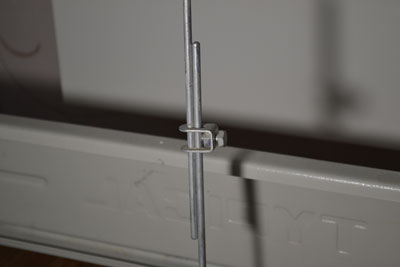
Es mejor ajustar la altura del pie chi kut nakhil del pedal aquí.
Vіd chto poner el swedkіst de la máquina de coser industrial robótica

La velocidad del robot y de la máquina de coser industrial debe depositarse con nosotros frente al número de vueltas del motor eléctrico. Este parámetro se puede encontrar en el intercambiador o en el pasaporte de la unidad. Pero es menos probable que los especialistas en costura de fábrica rasquen esos detalles. Para otras máquinas, este parámetro del motor robótico es diferente, los cambios de marcha son otra forma de regular la velocidad de la máquina de coser robótica.

Y para ayudarse en sí, cambie la polea del motor. Cuanto mayor sea el diámetro de la polea, más limitada será la velocidad de la máquina de coser robótica.
No es fácil cambiar las poleas, para lo cual se necesita una llave de 19 y la propia polea, que le da sonido al motor. Ale, espera, si ajustas la longitud de la correa de transmisión y tienes muchas fluctuaciones, es posible que tengas un diámetro más pequeño.

Lo que trajo una buena pronunciación, tan moderna, puede ser silenciosa y hermosa como una compañía típica, pero no la necesita. Tse vіdnositsya to shvachok-homework. Los hedores a menudo se practican en casa en máquinas de coser industriales, como la clase 1022, la clase 97. Por tres motivos diferentes, pero en primer lugar, el ruido del robot y el hedor no pueden vencerlos.
Para resolver este problema de manera fácil y económica, compre un accionamiento eléctrico TUR-2 e instálelo directamente en el cuerpo de la máquina industrial. No es posible explicar cómo instalarlo, desde el punto de vista de la piel, es posible superar su propia decisión. Y también podemos hacer, si es necesario, reemplazar el enchufe y soldar las varillas, como se muestra en la foto.
Además, si un motor de este tipo tiene que soldar la posición de los devanados con nieblas, el motor se envolverá en otro día. Estará feliz cuando esté conectado a una unidad overlock de este tipo.
Pero de todos modos, en aras del reconocimiento solo para los electricistas, no se recomienda que los fanáticos de ucrania recojan los motores de forma independiente y, para el caso, no debería haber más minyat, soldadura. No solo estoy directamente inseguro de un ataque de rasgueo, sino que estoy enganchado. Vaughn se manifiesta en una hora trival. En caso de sobrecalentamiento de los devanados del motor, enróllelo en la estación que no funciona de la máquina de coser, pero puede conectarse al borde de los devanados.
En máquinas industriales también se pueden instalar otras marcas de motores eléctricos, pero recomendamos solo aquellos que hayan sido revisados por nosotros, y el propio accionamiento eléctrico TUR-2.
Y no olvide que la velocidad de la máquina de escribir robótica se reduce significativamente y coser en ella puede durar poco, los grandes descansos (pausas).
A veces es necesario encontrar una máquina de coser, más precisamente, quitar la carcasa de plástico de la máquina para poder acceder a otros nudos. Tal necesidad de culpar es aún más rara y culparla solo si es necesario reemplazar el motor eléctrico de la máquina de coser y la correa de transmisión. Vtіm, para reemplazar el accionamiento eléctrico, a veces retire la cubierta inferior. Y el eje debe estar "atascado", tendrá que volver a levantar la máquina.
En este artículo, sabrá cómo saber la causa de la falla del accionamiento eléctrico, así como también cómo reemplazar el motor eléctrico de forma independiente.
Sonido Los problemas del accionamiento eléctrico de costura son causados por los pedales, no por el motor eléctrico. No se recomienda levantar el pedal de forma independiente. Cuide el pedal, no tuerza los dardos, no los “pase” con estilo bajo y tenga en cuenta que por estos dardos debe pasar un chorro eléctrico con un voltaje de 220 voltios.

Máquina de coser a mano: fijación y reparación del accionamiento.
La máquina de coser es simplemente indispensable al coser otras telas y navit shkir. Y el eje del accionamiento manual del piso no es práctico, por lo que no hay bazhanya que vencer. Sin embargo, esta situación es fácil de corregir si compra un accionamiento eléctrico de costura a la vez del pedal y la correa de transmisión en el kit. El motor eléctrico de cuero se puede montar de forma regular, lo que le permite instalarlo en una máquina de coser manual.
El accionamiento inferior de la máquina de coser es ahora una exhibición de museo. Maquíllate, toca, esa pierna está empapada. Antes de eso, la máquina a menudo comienza a girar en la dirección equivocada. ¿Cómo actuar como un yogo vikoristannya, como una máquina Gaviota o Podilska como un todo vlashtovu? Solo necesita instalar el accionamiento eléctrico de costura. Sujeción para cuero nuevo piel Gaviota. El accionamiento eléctrico en sí mismo es menos costoso que una correa nueva para el accionamiento a pie.
El prefijo en zigzag para una máquina de coser es un accesorio inteligente que imita una fila en zigzag con una máquina simple de fila recta del tipo Podolsk.
En este artículo, sabrá por qué la máquina se enrolla con una barra horizontal y cómo reparar el defecto en la fila de costura con sus propias manos.
La máquina de coser no está cosida, ya que la arandela de fricción del volante está mal instalada o los casquillos y casquillos están oxidados después de una hora de arduo trabajo.
El modelo de cuero de la máquina de coser tiene un juego de patas diferente. Descripción del reporte vykoristannya las patas para las máquinas de coser de la firma Janome.
Para trabajar con piel natural, necesitará herramientas especiales, accesorios para instalar accesorios, adhesivos y otros materiales aplicados.
Wimogi para accionar máquinas de coser.
Asunto: Accionamiento eléctrico para máquinas de coser.
conferencia 7.
En las máquinas de coser, el trabajo se lleva a cabo en mentes soberbiamente importantes, si el tramo del año
realizar hasta 1000 arranques de máquina. ¿Puedes encontrar otra máquina tecnológica con un modo de funcionamiento similar? ¡Y la velocidad del eje principal es de hasta 9000 hv -1! ¡Muchos engranajes no muestran tales botines! Estrellas y asistencia especial al accionamiento eléctrico:
1. Velocidad: construcción de seguridad en el eje principal de la máquina (5 - 6) 10 3 xv -1.
2. Vitrimati culpable hasta 1000 vimkneni por un año.
3. Arranque suave, regulación más suave de la velocidad de la máquina.
4. Control de la conducción - pedal con la fuerza limitadora de la presión sobre él - 60 N de pie y sentado hasta 150 N.
5. Mati high K, P, D, (en el taller se vuelve demasiado ahumado en ausencia de máquinas de coser bien cosidas), cosido a mano (no moleste al operador para que se siente libremente), seguro para el robot, ambos en eléctrico y en el desgaste mecánico.
6. Vartist e / drive puede ser objeto de un debate especial. (En los accionamientos eléctricos, que están automatizados, hay más de 30 microcircuitos, ¡y esta variación es equivalente a la del cabezal de la máquina!)
En la industria de la costura, existen principalmente tres tipos de accionamientos eléctricos, según el tipo de máquina tecnológica:
· Contactores- si al girar el vimikacha o al pisar el pedal, el automóvil toma inmediatamente la velocidad de pasaporte. No es necesario para la suavidad de la puesta en marcha y la regulación de la velocidad. Impulsado a estancarse en máquinas simples y silenciosas que rara vez parpadean (rebobinado de tela, doblaje, etc.)
· Fricción- si entre el motor eléctrico asíncrono y la transmisión por correa trapezoidal se instala un embrague de fricción, que actúa sobre el pedal, lo que garantiza un arranque suave y un ajuste suave de la velocidad en movimiento de la máquina. Hoy puede ser más amplio, tanto en máquinas universales como especiales.
· automatización propulsión eléctrica Le permite programar el robot de la máquina, realizar automáticamente las operaciones principales y adicionales del ciclo tecnológico. Caro y plegable, baja eficiencia. Y la tendencia es sustituir al yoga, perdonemos la buena regulación del motor trepidante.
En el pequeño 5, se proporciona un diagrama de bloques del embrague de fricción del accionamiento eléctrico de fricción de la máquina de coser, para cuya designación:
1. Eje del motor eléctrico asíncrono,
2. Disco conductor, fijado de forma segura en el extremo del eje, sin revestimiento de anillo, acero,
Disco de referencia, con zapatas anulares en ambos lados, fabricado en material de alta fricción y resistente al desgaste.
Fijación del disco en el embrague de fricción del eje 6.
3. El disco es galvanizado, no robusto, a menudo flotante, de modo que su superficie se autorrecupera en la superficie del disco 3 cuando se cierra con él.
4. Comprimiendo el resorte, tirando del eje 6 de una vez desde el disco 3 se rompe hacia la derecha hasta que se cierra con el disco 4.
5. Muftí eje; ajuste aproximado con el cojinete de bolas izquierdo del buje 7 y el ajuste derecho.
6. Manguito interior horizontal de Rukhoma. Ruhaetsya en el cuerpo del mufti a la mano derecha-izquierda a la vez desde el eje 6.
7. Polea de correa trapezoidal, conductora. En máquinas industriales antiguas, se instalaron dos poleas, una más pequeña (no se muestra la pos. 9), para funcionar en una máquina nueva o vieja para reparar; alcanzó una reducción de la velocidad del coche en un 25%.
10. Rodillo en la ranura del casquillo suelto.
11. Importancia de dos hombros.
12. Empuje dozhini regulado.
13. Pedal de arranque.
14. Cuerpo Mufti, que se dobla en dos partes (no se muestra en el diagrama a continuación).
quince . Máquinas Promsteel.
16. Una placa, hasta que el cuerpo del manguito en el montaje esté articulado desde abajo. En sharnirі - el último gvint; sirven para fijar el cuerpo del acoplamiento en la posición requerida para el correcto apriete de la transmisión por correa trapezoidal.
Universidad Técnica Nacional de Donetsk
Calificación del trabajo
En el tema:
Desarrollo de un modelo dinámico para un accionamiento con variador de fricción
Vikonav:
Estudiante gr. MS-03n: Kasatka P.O.
Kerivnik: Derkach O. V.
Consultor: Gorobets I.O.
DONETSK 2007
ENSAYO
Trabajo de licenciatura: 38 páginas, 15 libros pequeños, 1 suplemento, 1 tabla, 5 dzherel.
Para este robot de licenciatura, es necesario desarrollar un modelo dinámico para el accionamiento, con el fin de vengar el variador de fricción; sume las ecuaciones diferenciales que describen los procesos dinámicos del impulso.
Objeto de seguimiento: accionado por un variador de fricción.
Meta trabajo: es necesario desarrollar un modelo dinámico del variador para reemplazar el variador de fricción, con la ayuda del paquete de software MatLab Simulink, para asegurar los parámetros necesarios del proceso de transición.
variador friccional, proceso transicional, alineación diferencial, modelo dinámico, acoplamiento geométrico, momento de inercia
Entrada
1 Zagalni vіdomostі sobre variadores de fricción
2 Datos semanales
3 Diseño de diseño del variador de fricción detrás de la tensión de contacto
4 Desarrollo de un modelo dinámico
4.1 Diagrama estructural del objeto y proceso en el nuevo
4.2 Análisis de provisiones y factores que se tienen en cuenta en el modelo de casación
4.3 Modelo dinámico
4.4 Designación de las características de inercia de las partes móviles y dureza de los elementos de accionamiento
4.5 Implementación de un modelo dinámico en Simulink
5 Análisis de procesos dinámicos en el objeto
5.1 Análisis de procesos dinámicos en el área del reloj
5.2 Presentación de un modelo dinámico cerca del espacio de las estaciones
5.3 Diseño de controlador modal
Visnovok
perelik posilán
apéndice
Entrada
La mayoría de las máquinas e instalaciones modernas se crean de acuerdo con el esquema: dvigun - transmisión - órgano de trabajo (vykonavchiy mekhanizm). La necesidad de la transmisión de un eslabón intermedio entre el motor y los órganos de trabajo de la máquina está relacionada con las tareas de aumento de la productividad, tobto. zbіlshennya їhnёї shvidkodії.
La hora del cambio de marchas por fricción entra en la hora principal del ciclo de trabajo de la máquina, lo que también aumenta la productividad de la máquina en un instante. El problema del aumento de la productividad está directamente relacionado con el desarrollo de métodos para el seguimiento dinámico de las máquinas y la elección de sus parámetros y estructura óptimos.
Para un modelo dinámico adicional, se realiza un análisis del sistema, sin la participación de un objeto real, y en base a esto, es posible inducir un sistema de control para el objeto, que postula el comportamiento del sistema de control de ese objeto.
1 Información general sobre los variadores de fricción
La fricción se llama transmisión, el robot se basa en las fuerzas victoriosas del roce, que se atribuye al contacto de dos cuerpos de envoltura bajo la fuerza de presión Q.
Los engranajes de fricción de la mano envolvente se pueden dividir en dos grupos principales: los engranajes no están regulados, es decir. con relaciones de transmisión mentalmente rápidas, esa regulación de marcha que le permite cambiar suavemente la relación de transmisión (regulación continua) (Fig. 1.1).
Uno de los cambios más simples y ricos es completar el engranaje de fricción superficial, que se pliega en el movimiento más simple de dos ruedas (kotkiv), fijado en los ejes de transmisión. Para transmitir el movimiento sin forjar, es necesario agregar una fuerza Q a una rueda, la cual es suficiente para frotar en el área de contacto, con lo cual la potencia de la cadena es mayor que el tamaño de la susilla circunferencial que se está transmitiendo.
Figura 1.1 - Variador de fricción frontal
Las ventajas de los engranajes de fricción son: suavidad y silencio del robot, simplicidad de diseño, imposibilidad de rotura durante cambio brusco apriete en uno de los ejes del viento, la capacidad de lamer el kotkіv, la capacidad de ajustar la velocidad de forma continua sobre la marcha, sin un engranaje.
Nedolіkami є: la necesidad de un accesorio ajustado, un gran agarre en el eje que apoye la divinidad de la fuerza del accesorio ajustado, lo que aumentará su tamaño y hará que la transmisión sea voluminosa, y también mida la cantidad de estanqueidad que se transmite; lentitud de la transmisión a través del lamido de los gatos; debido a la alta depreciación.
Los variadores de fricción se detendrán tanto en la cinemática como en las transmisiones de potencia en las vibraciones, si se necesita una regulación continua de la velocidad (la transmisión por engranajes no permite dicha regulación). Los variadores de fricción se utilizan en máquinas-herramienta, en máquinas de licor, máquinas industriales y de transporte, accionamientos de dispositivos letales y máquinas metalúrgicas, robots y manipuladores, sistemas de acolchado digital, mecanismos para el poder del estado y otros tipos.
El valor de los variadores friccionales como reguladores continuos y de velocidad aumenta en la conexión con un amplio frente de trabajo a partir de la automatización del control de procesos vibracionales.
Una de las piezas forjadas del variador de fricción está hecha de aceros yakish (40, 50, ShKh15, etc.), y la otra está hecha de chavun gris, textolita, fibra y otros plásticos.
Tres tipos de engranajes sin fricción con variadores de fricción frontal torsional de cuerpo sólido son los más simples constructivamente. Con tal variador, es posible mover la rueda a lo largo del eje en líneas rectas, indicadas por flechas, con qué engranaje, el cambio cambia suavemente a un cambio en el diámetro de trabajo del disco.
La forja geométrica del variador está determinada por la fórmula:
signo "+" - para la rueda motriz, signo "-" - para el disco impulsor (Figura 1.2 i b),
de - el radio del disco, en la forja máxima;
b es el ancho del disco.
Figura 1.2 - Variador de fricción frontal:
a) de una rueda guía; b) de la unidad
El principal defecto de los variadores frontales es un gran forjado geométrico, que en transmisiones de potencia de su rango de regulación de la relación de transmisión debe ser intercambiado.
Con una rueda con alambre, el radio se asigna a la siguiente fórmula:
Durante el diseño rozrahunka acepta:
Coeficiente del stock de zcheplennya;
Radio mínimo de trabajo del disco.
Las superficies de trabajo de las ruedas de fricción de acero están pulidas con una brevedad de Ra 0,63...0,32 micras.
Para escapar de la falsificación epidemiológica, no se rastreó la parte central del disco.
Razrahunok en el voltaje de contacto debe llevarse a cabo en el diámetro mínimo del disco, cuando se requiere la mayor fuerza de presión y la forja alcanza el mayor valor.
Figura 1.3 - Acoplamientos de empuje: a) tornillo; b) kulkove
2 Datos semanales
Es necesario abrir la transmisión de fricción frontal para el accionamiento del transportador de rayas para la mente, que la rueda de alambre transmite la tensión P = 2 kW para la velocidad máxima ω1 = 90 rad / s a la rueda impulsada, que envuelve con el velocidad máxima ω2max = 45 rad/s.
Como accesorio de agarre, elegimos un accesorio de accesorio atornillado, que asegurará la fuerza de agarre permanente.
Se asigna el material de la rueda: la más pequeña es textolita PTK y la más grande es acero 45.
Aceptamos el rango de regulación de la relación de transferencia
La transmisión se debe a la fórmula:
Momento de torsión Mn, que es transmitido por la rueda motriz
Para transferir la tirantez dada, expresada por la fuerza circunferencial, es necesario asegurar la mente de fuerza frotando entre los gatos.
de β es el coeficiente del stock de cadenas, β=1,3.
El momento de la pérdida se representa mediante la siguiente fórmula:
3 Diseño de diseño del variador de fricción
por tensión de contacto
El diámetro d1 de la rueda más pequeña es significativo desde el punto de vista del material de contacto. Se toma el coeficiente del stock de zchelennya, β = 1.3; coeficiente de pérdida de la línea de contacto más larga f=0,3; presión de contacto admisible (textolita sobre acero) [σ]k = 70 N/mm2, módulo de elasticidad para la rueda más pequeña (textolita) E1=6x103 MPa, para la rueda más grande (acero) E2 = 2,15x105 MPa.
Orientando el módulo de elasticidad E para la siguiente fórmula:
Rango de ajuste:
En el diseño rozrahunka acepta
Estructuralmente, el diámetro máximo del disco:
Forja geométrica con rueda motriz:
Іnshі razmіri kolіs priymayut constructivamente.
4 Desarrollo de un modelo dinámico
4.1 Diagrama de bloques del objeto
Este sistema consta de un motor eléctrico, que crea el momento del motor Mn, el embrague, la rueda motriz, el disco impulsado, los cojinetes y el cuerpo de trabajo. El motor crea un momento para girar, con una junta giratoria ω, que se transmite a través de un embrague en una rueda con cable, desde un nuevo disco de guía, luego a un cuerpo de trabajo (Fig. 3.1). Una fijación atornillada asegura la transmisión del momento de giro.
Figura 4.1 - Esquema de Rozrahun para la unidad.
4.2 Análisis de las concesiones que se aceptan para la hora de creación del modelo
Para armar el modelo se toma un motor eléctrico, que asegura el momento constante, el cual al girar, manguitos z η = 0.98, rodamientos de bolas z η = 0.99 y rodamientos de rodillos z η = 0.97. Las deformaciones de la rueda y el disco no se dañan.
Figura 4.2 - Modelo de transmisión frontal
4.3 Modelo dinámico
El modelo puede tener 4 grados de libertad y hasta el final, que está incluido en el modelo, se describe mediante un sistema de niveles diferenciales, sobre la base de los resultados, que se toma de los parámetros dinámicos del accionamiento. El sistema de igualdades diferenciales se puede ver:
de Is, Ip - momentos de inducción de inercia de las partes del motor y el cuerpo de trabajo que están envueltos;
I1, I2 – inducción del momento de inercia de la rueda y el disco de manera correcta;
φs, φp, φi son las coordenadas del vértice de las masas que se envuelven;
Мn - momento de las fuerzas motrices (dvigun);
Mo - el momento de las fuerzas del soporte (del cuerpo de trabajo);
c1, c2 - dureza de los ejes;
k1, k2 – coeficiente de amortiguamiento;
ε - forja geométrica.
Tres líneas diferenciales, que describen el comportamiento del accionamiento en el proceso robótico, se han compuesto de un modelo dinámico. Dali vykonuєmo doslіdzhennya modelo plegado. El modelo está diseñado con una inyección de una sola etapa, que se inyecta en el eje del motor.
4.4 Designación de las características de inercia del rukhlivy.
piezas y dureza de los elementos de accionamiento
Momentos de inercia de las piernas, que se enrollan, significan un camino de rosario. Momento de inercia de guiado de las piezas del motor, que están envueltas:
Momento de inercia de guiado de las partes del cuerpo de trabajo que se envuelven:
Momento de inercia de guiado de la rueda:
Momento de inercia de guiado del disco:
Razrahuemo dureza de ejes:
de - módulo de resorte del segundo tipo (zsuvu),
Dureza del eje estriado:
Dureza de gwent:
4.5 Implementación de un modelo dinámico en Simulink
Sobre la base del sistema de ecuaciones diferenciales (cláusula 4.3) para el sistema Simulink interactivo adicional para modelar sistemas dinámicos no lineales, construimos un diagrama de un modelo dinámico para un accionamiento con un variador de fricción (Fig. 4.3). El significado de los cambios, como en el esquema del modelo dinámico, se da en la Tabla 4.1.
Tabla 4.1 - Designaciones de los cambiables que salen victoriosos
en un modelo dinámico
| Descripción | Cita | Esquema | Sobredosis. |
| Momento de inercia de guiado de las partes del motor que envuelven | Es | ||
| Momento de inercia de guiado de los detalles del cuerpo de trabajo, que se envuelven. | IP | ||
| Momento de inercia de guiado de la rueda | I1 | ||
| Momento de inercia de guiado del disco | I2 | ||
| Coordenadas de corte de máscaras envolventes | - | radio | |
| Momento de las fuerzas motrices (dvigun) | Minnesota | Nuevo Méjico | |
| Momento de apoyo de fuerzas (cuerpo de trabajo); | Mes | Nuevo Méjico | |
| Dureza del eje estriado | s1 | Nuevo Méjico | |
| dureza de gwent | c2 | Nuevo Méjico | |
| factor de amortiguamiento | k1 | - | |
| factor de amortiguamiento | k2 | - | |
| coeficiente de existencias | β | b | - |
| forja geometrica | ε | mi | - |
Figura 4.3 - Implementación de un modelo dinámico en Simulink
Datos de salida:
5 Análisis de procesos dinámicos en el objeto
5.1 Análisis de procesos dinámicos en el área del reloj
Del análisis de los gráficos, es claro que a través del poder de inercia de los objetos,
a través de los resortes de potencia, la forja geométrica y la fuerza de la tercia, se mejora el fraccionamiento del sistema. Desplazamiento del disco durante el primer segundo del programa de torque, el eje del motor es prácticamente igual a cero (Fig. 5.1-5.4).
Esto está inspirado en el poder del resorte del eje y el tornillo y el poder de inercia de la rueda y el disco, en el momento del lanzamiento, la envoltura se enrolla, luego, cuando se ajusta el momento para girar, la envoltura del disco se desliza en el momento.
Figura 5.1 - Profundidad del corte a la rotación del eje del motor (rad) por hora (s)
Figura 5.2 - La caída del kuta al giro de la rueda (rad) por hora (s)
Figura 5.3 - Dependencia de Kuta en la rotación del disco (rad) por hora (s)
Figura 5.4 - Independencia de la kuta a la rotación del cuerpo de trabajo (rad) por hora (s)
5.2 Datos del modelo dinámico
en la extensión de los campamentos
Un modelo dinámico, descrito por ecuaciones diferenciales, puede representarse en forma de ecuaciones matriciales (matrices A, C, D) o presentarse en forma de función de transferencia. Dado que el modelo puede tener 4 grados de libertad, entonces es necesaria la transformación de Laplace para eliminar la función de transmisión del trabajo sin problemas. Para esto, podemos imaginar un modelo en forma de matrices, vikoristovuchi їх rozrahunka en el sistema interactivo MATLAB.
Alineación diferencial del modelo dinámico:
Rehagamos el sistema.
Imagine un modelo en forma de matriz:
Introduzcamos la siguiente definición:
El modelo dinámico se ve así:
Multipliquemos las partes dañadas de la relación con la matriz de retorno:
Matriz de retorno para la ayuda de MATLAB:
L=;
F=[-k1 k1 0 0; 0-k1 k1 0; 0 k2-k2 0; 0 0 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Multiplica la matriz inversa por la matriz:
R=[-c1 c1 0 0; c1-c1 0 0; 0 0 -c2 c2; 0 0 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Multiplica la matriz inversa por la matriz:
K=;
Las matrices A, B, Z, D pueden verse como:
Introduzcamos la resta de la matriz en el archivo M de MATLAB y restemos la función de transferencia del modelo dinámico, para describir la respuesta del modelo a la inyección en forma de racha (Fig. 5.5, 5.6).
A=;
B=;
La función de transferencia puede verse como:
W(s) = (-2.132e-014 s^7 + 16.39 s^6 + 6.586 s^5 + 3.275e004 s^4 - 2343 s^3- 6.166e006s^2 - 7.573e004 s + 1.407e s^8 + 1.101 s^7 + 5156 s^6 + 3080 s^5 + 6.401e006 s^4 + 6.915e005 s^3 - 1.742e008 s^2 - 2.015e007 s + 2.25e-007).
Figura 5.5 - Proceso de transición en un modelo dinámico
Figura 5.6 - Características amplitud-fase-frecuencia y fase-frecuencia
Del análisis de los gráficos se puede ver que la cogeneración del modelo crece y no se detiene. Por lo tanto, es necesario diseñar un regulador (corregir lanka) (Fig. 5.7), de modo que el modelo dinámico sea pequeño y se desvanezca durante el proceso de transición, una pequeña hora de calma (1-5 segundos) con un exceso de no más que 10-15%.
Figura 5.7 - Modelo dinámico con controlador modal
5.4 Diseño de controlador modal
La idea de crear un regulador modal se basa en que es necesario seleccionar este coeficiente de tal forma que el polo del lazo cerrado de la regulación se oponga en la zona sombreada. Es necesario garantizar el desvanecimiento de coli durante el proceso de transición y una hora corta de calma con un exceso de no más del 10-15% (Fig. 5.7).
Figura 5.8 - El área de ranurado de los postes de los sistemas de acero.
Para favorecer un regulador modal, es necesario volver a verificar la queratinización del modelo.
La reverificación de la queratinización se realiza según el criterio adicional de Kalman:
Si el rango de la matriz cuadrada Ss(n,n)= es igual al orden de la matriz n, entonces el modelo, que está descrito por las matrices A,, C, D, es keroviano. El orden de la matriz del modelo dinámico es más avanzado 8.
El rango de una matriz es el tamaño máximo de una matriz cuadrada, cuyo signo no es igual a cero.
El rango de la matriz se puede asignar a una función adicional rango en MATLAB:
El rango de la matriz A del modelo dinámico depende del orden, también el modelo de Kerovan.
El método de selección asigna polos para una nueva función de transferencia de un circuito cerrado. Con la ayuda de MATLAB, puede conocer el coeficiente del controlador modal y tomar el proceso de transición del modelo dinámico con el controlador (Fig. 5.9).
p=[-7-0,2i-7+0,2i-5-0,5i-5+0,5i-5-6-17-10];
sysE=ss(A-B*k,B,C,D);
Coeficiente de controlador modal:
k=[-237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
Del análisis del gráfico 5.7, se puede ver que el proceso de transición del sistema terminará en 2.5 segundos sin sobrepasarse.
Figura 5.9 - Proceso de transición para un modelo dinámico con regulador
Visnovok
Que robots han desarrollado procesos dinámicos, que tienen accionamientos con un variador de fricción. Se seleccionaron los datos de salida, se fijó el diseño del diseño del variador de fricción, se determinaron las características de inercia de las partes móviles y la dureza de los elementos de accionamiento.
Bula ha compilado un diagrama de bloques del objeto a investigar, una descripción matemática del modelo dinámico que permite al sistema cambiar el comportamiento del sistema en caso de un solo ataque contra él.
Asimismo, se realizó un análisis de procesos dinámicos en los objetos del área de vigilancia y las extensiones de los campamentos. Diseño de un controlador modal, que asegura la finalización del proceso de transición de un modelo dinámico en 2,5 segundos.
Literatura
1. Guzenkov P. G. Detalles de la máquina: Navch. para universidades. - M.: Visch. escuela, 1986. - 359 p.
2. Bakaev N.A., Voloshina O.M. Fundamentos del diseño de engranajes de fricción. - Presentación de la Universidad de Rostov, 1985. - 176 p.
3. Pronin BA, Revkov G.A. Bezstupіnchastі klinopasovі y friktsіynі transmisiones. - M .: Mashinobuduvannya, 1980. - 320 p.
4. Komarov MS Dinámica de mecanismos y máquinas. Construcción de maquinaria, M., 1969.
5. Ivanov E. A. Acoplamientos Mashguiz, M, 1959.
Clase 56a, 55 g N° 145832
Prepago grupo M 284
V.A. Pishchikov
ACCIONAMIENTO POR FRICCIÓN DE LA MÁQUINA DE COSER
Reclamado el 28 de marzo de 1961. para M 724039/28 вЂ" 12 en el Comité sobre el derecho de los enólogos y vodkrittiv en los Ministros de Radiación de la SRSR
Se promueve el accionamiento por fricción de la máquina de coser, que es más simple por su diseño y compacta y usuvaє inyección negativa de las fuerzas de inercia del volante durante la puesta en marcha de esa vibración de la máquina de coser.
Es constructivo freír el juego friccine del PoleAє, en orden, Scho Vіn se convierte en el líder del SKIV, Zemontovaniya para completar el Cullete pіdshipnikіv en el cuerpo de la máquina con un rodillo de cable, Zovnіshnє Kiltsi є Providnoy Elemang, afeitado para llevar a través de los rodillos. envolviendo el anillo interior del rodamiento, fijado al eje de cabeza de la máquina.
Los cojinetes Kulkov_ (un lp obdva) están montados en el cuerpo de la máquina para un casquillo roscado adicional, atado al pedal de la cuchilla de la máquina.
En el sillón hay una representación esquemática de la pronación de la tracción friccional.
La polea 1 (volante) está firmemente reforzada en el anillo exterior de 2 cojinetes de contacto angular de rodillos cónicos estándar, el anillo interior del 8º cojinete está firmemente fijado en el eje principal 4 de la máquina de coser. Separador b, de fabricación especial en lugar de uno estándar, pegado al cuerpo de la máquina o a una pieza, fuertemente amarrado al cuerpo, por ejemplo, con casquillo de cojinete roscado, que transmite el eje de la susilla; de lo contrario, el anillo de cojinete 9 se sujeta con una polea 1.
De esta forma, el accionamiento por fricción será seguro cuando se encienda la máquina, la velocidad será hasta la velocidad máxima y, en cambio, cuando se encienda la hora de vibración de la máquina, será la menor igual. a la vibración de la máquina por la parada de los accionamientos.
Sujeto a vinificación
1. Friczіniy Vіdd Schweinja Machini, Vіdomiy Tim, Shah, scho, Methods of the context of context, Vіn se convierte en sí mismo en el artillero de Shkіv, Zemontovaniy por el adicional Culite pіdshipnikіv en el Cuerpo de la máquina z Mozhlivіstea de la eje del eje de las Obligaciones de Kilkoloviy P_DSHIPNIK, Zovnіshnє Kiltsy un elemento conductor, que se conduce a través de los rodillos y se sujeta al cuerpo de la máquina, un separador para envolver en el medio del anillo del cojinete, fijado al eje principal de la máquina.
2. Conduzca para el párrafo 1, en el caso de l y h y y shy tim, para el sistema operativo "en el movimiento de la polea, los rodamientos de bolas son uno u otro, montados en la carrocería del automóvil para un casquillo roscado adicional, atado al pedal
Ordenanza AV Nechaikin
Techred T. II. 1 urilko Corrector V. M. Andrianova
Editor V, Santa Haaova
Por .., hasta psch. 1.111-62 r. Formato boom. 70; 108/,. Vista del volumen 0.18. yo
Zach. 2709 Circulación 500 Precio 4 kop.
TsBT1ch Al comité de la derecha y del lado derecho del comité
Moscú, Centro, M. Cherkasky prov., D. 2/b.
Drukarnі TsBT11, Moscú, Petrivka, 14
Los accionamientos de fricción con un amplio rango de regulación siguen el circuito diferencial.
Los accionamientos de fricción están sobredimensionados para instalaciones experimentales.
Unidad de fricción continua de Svіtlozarov.
Rozrahunok impulsión de fricción fundaciones en la solución, otrimanuyu schee Euler para el hilo gnuchkoi giuchkoi. Habiendo ofendido a una mujer, una y la misma, una y la misma, se miraron al mismo tiempo en un bloque con un montón de hilo, que puede ser elástico.
La eficiencia del accionamiento por fricción está determinada por el coeficiente de tracción.
En los accionamientos por fricción, la fuerza de tracción se transfiere a un órgano flexible (puntada, cuerda, lanza) mediante el roce del elemento de accionamiento. La tracción friccional zastosovuyut para líneas y cuerdas, es más importante - para lanceros.
| Cambiar gráficos. |
Con un accionamiento por fricción en la mazorca, la tensión es necesaria, salvo la designación ya designada, así como el rango de cabeza, para la creación de una fuerza suficiente del acoplamiento del elemento de tracción con el borde de la unidad de accionamiento. En este caso, el valor de yogo está determinado por el valor de la fuerza de tracción y los parámetros del accionamiento.
El funcionamiento normal de los accionamientos de fricción está garantizado por los devanados de los accesorios tensores instalados (div. Ch. En transportadores estacionarios cortos (hasta 60 m), enrolladores, retráctiles y portátiles, se instalan accesorios tensores mecánicos.
Los Mlins con accionamiento por fricción (Sh-25, Sh-70) están equipados con dos rodillos impulsores y dos rodillos de apoyo con aceite plástico.