Egy varró elektromos hajtás, legyen az ipari gép, nem csak a fordulatszám (súrlódás) beállítására eltérő kialakítású lehet, hanem egy másik elektromos áramkör, a villanymotor működési elve.
Az elektromos hajtások egyes modelljei alacsony, 40 és 110 W közötti energiafogyasztással, alacsony fordulatszámú burkolással és aszinkron típusú robotmotorral rendelkezhetnek. Más szóval, a pobutovy villanymotor nem mutatja a nagy és triviális újításokat és a vimagaє időszakos "javítását". Az ipari gép varrógépe megszakítás nélkül, túlmelegedés és hőpazarlás nélkül üzemeltethető.
Ha tömegvarrógépre van szüksége, gondoljon egy jó meghajtóra. A goloshennyami mögött olcsón használt asztalokat vásárolhat a Radyansky kiadás motorjaiból. Tse nadіynі és pratsezdatnі elektroprivodі és lehetséges, hogy megnyerje a következőket. Ale vrahuyte, scho az összes bűz még hangosabban működik, és a zaj szabályozása nem vész el. Ezért azt javasoljuk, hogy idejében vigye be például acélt és ólmot, amelyeket a készlet tartalmazza a Typical varrógéphez. Én magam egy ilyen varrás elektromos meghajtó állítólag felül ebben a cikkben.

Vásárolhat varró elektromos meghajtót a Typical cégtől, és bármilyen ipari stílusra felszerelheti, de jobb, ha egy asztallal ellátott készletben fürdeti a jógát, gyakrabban maga a stílus olcsóbb a dvigunnál.
Egyedi varrógéphez egyébként egy praktikus varróacél is megvásárolható. Zruchny kiterjedésű acél, és ugyanakkor rozkrіyny varrás acél, hogy kényelmes legyen a munka, ami obov'yazkovo jelenti a hangulatot, és életképes a munka szintjén. Még ha lehetősége van is sokat varrni, ne tévesszen meg ilyen "dribnitsy".

Egy olyan jelentéktelen részletet, mint a vimikach, az elektromos hajtáshoz irányítva kényelmet teremt a robotban, és átitatja a hangulatot.
Az elektromos motor feszültsége és a feszültség a
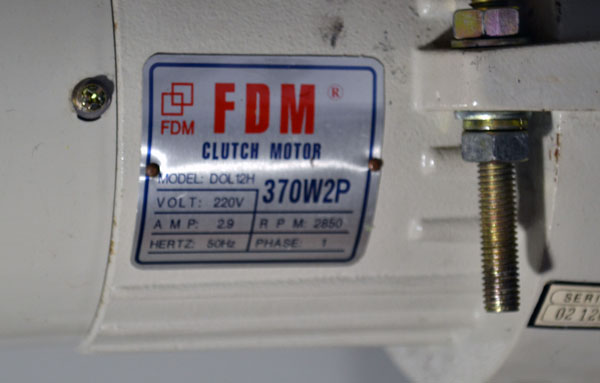
A motor elülső oldalán egy címke található, amely jelzi a mérőműszer feszültségét és a motor tömítettségét.
Ha úgy dönt, hogy otthon vagy egy kis stúdióban telepít egy autót, ahol nincs 380 voltos konnektor, válasszon egy villanymotort egy 220 V-os robothoz.
És a motor feszessége ezt a fenekét nem lehet különösebb jelentősége, a robotok és gépek oskolki shvidk_st más tényezőkben rejlik. Beszéljünk róluk egy troch-ban lentebb.
Mi az a súrlódó hajtás? Ha autót vezet, akkor Ön felelős azért, hogy tudja, hogy ilyen kapcsolat van. Tehát a varró elektromos hajtás súrlódási tengelye hasonló.
A motor fokozatosan körbeteker a nagyon swidkistyuval. A pedál megnyomásakor a textolit betétekkel ellátott súrlódó rögzítés (Ferado) tárcsája felmegy a motor lendkerékéhez, és kölcsönhatásba lép vele. Minél jobban rányomja a súrlódó tárcsát a villanymotor lendkerekére, annál jobb a tengelykapcsoló és annál nagyobb a sebesség. Ehhez néha száraz munkánál a szabályos szélességen megjelenik az énekes textolit illata.
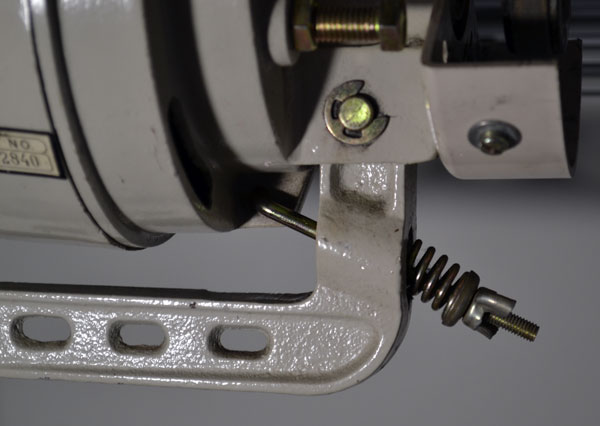
A pedál szabadonfutó lépéseit (susilla nélkül) egy csavar szabályozza.
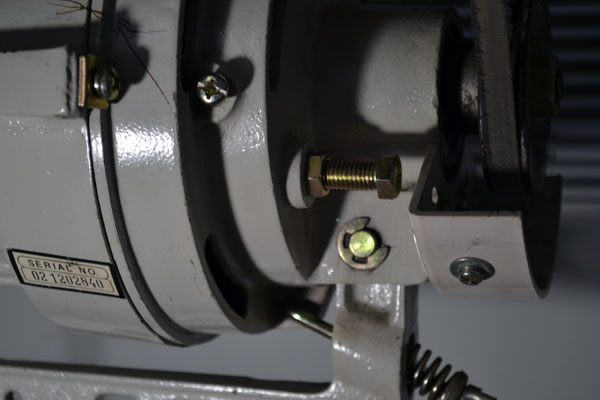
A tengely pedig ikercsavarral, pontosabban két csavarral (z üdvös oldal még egy) galma szabályozott. Tehát a galma mayzhe olyan, mint egy autó.
Ha nagy svédségen dolgozik, akkor a varrógép fogai után, tehetetlenség kedvéért folytatja a tekercset. Ehhez galmo kell, mintha egy már nem megfelelő csomagolásnak tűnne. A cim tengelye egy rögzítőanyával ellátott csavar és a galm élességlépése szabályozott.
A motor súrlódó tengelykapcsolójáról fotót nem tettünk fel, a motor javítása a villanyszerelő feladata, de a robotot saját kezűleg kell beállítani.
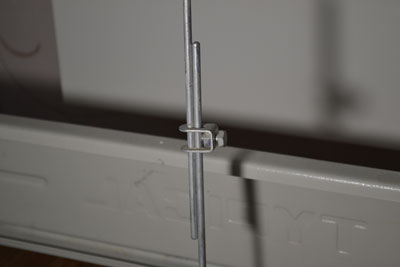
Jobb itt beállítani a pedál pіdёm chi kut nakhil magasságát.
Vіd chto fektesse le az ipari robotvarrógép swedkіstjét

A robot és az ipari varrógép sebességét a villanymotor tekercseinek száma előtt rakjuk le nálunk. Ez a paraméter a hőcserélőn vagy a hajtás útlevelében található. De az ilyen részleteket kevésbé karcolják meg a gyári varrás szakemberei. Más gépeknél a robotmotornak ez a paramétere eltér, a sebességváltók egy másik módja a robotvarrógép sebességének szabályozásának.

A segítségért pedig cserélje ki a motor szíjtárcsáját. Minél nagyobb a szíjtárcsa átmérője, annál korlátozottabb a robotvarrógép sebessége.
Nem egyszerű a tárcsák cseréje, amihez kulcs kell a 19-hez és magát a tárcsát, ami hangot ad a motornak. Ale, várj, ha véletlenül állítod a hajtószíj hosszát, és ha nagy az ingadozás, akkor lehet, hogy kisebb az átmérőd.

Milyen jó kiejtést hozott, egy ilyen modern, lehet, hogy zajtalan és szép, mint egy tipikus társaság, de nincs rá szükség. Tse vіdnositsya a shvachok-házi feladathoz. A bűzt gyakran otthon gyakorolják ipari varrógépeken, mint például az 1022-es osztály, a 97-es osztály. Három különböző okból, de elsősorban a robot zaja és a bűz nem tudja legyőzni őket.
A probléma egyszerű és olcsó megoldásához vásároljon TUR-2 elektromos hajtást, és szerelje fel közvetlenül az ipari gép testére. Nem lehet megmagyarázni, hogyan kell telepíteni, a bőr szempontjából lehetséges, hogy felülmúlja a saját döntését. És szükség esetén elkészítjük a dugó cseréjét és a rudak forrasztását is a képen látható módon.
Ezen túlmenően, ha egy ilyen motornak köddel kell forrasztania a tekercsek helyzetét, akkor a motor egy másik napon belül becsomagolódik. Boldog lesz, ha egy ilyen overlock meghajtóhoz csatlakozik.
De mindazonáltal, csak a villanyszerelők elismerése érdekében, Ukrajna rajongóinak nem ajánlott önállóan felvenni a motorokat, és ami azt illeti, ne legyen több minyat, forrasztás. Nem csak, hogy közvetlenül nem vagyok biztonságban egy ütőrohamtól, de kiakadtam. Vaughn egy trival óra alatt nyilvánul meg. A motor tekercseinek túlmelegedése esetén a varrógép nem működő állomásán tekerje fel, de csatlakoztatható a tekercsek széléhez.
Ipari gépekre más márkájú villanymotorok is beépíthetők, de csak az általunk áttekintetteket, illetve magát a TUR-2 elektromos hajtást ajánljuk.
És ne felejtsük el, hogy a robotírógép sebessége jelentősen lecsökken, és a rávarrás rövid ideig tarthat, a nagy szünetek (szünetek).
Néha meg kell találnia egy varrógépet, pontosabban el kell távolítania a gép műanyag házát, hogy hozzáférjen más csomókhoz. Az ilyen hibáztatás még ritkább, és csak akkor hibáztatható, ha ki kell cserélni a varrógép villanymotorját és a hajtószíjat. Vtіm, az elektromos hajtás cseréjéhez néha távolítsa el az alsó fedelet. És a tengely legyen "elakadva", újra fel kell venni a gépet.
Ebben a cikkben megtudhatja, hogyan ismerheti meg az elektromos hajtás meghibásodásának okát, valamint hogyan kell önállóan cserélni az elektromos motort.
A varrás elektromos meghajtásának problémáit a pedálok okozzák, nem az elektromos motor. Nem ajánlott önállóan felvenni a pedált. Vigyázzon a pedálra, ne csavarja a dartsokat, ne „álljon” rájuk alacsony stílusban, és ne feledje, hogy ezeken a dartsokon 220 V feszültségű elektromos sugárnak kell áthaladnia.

Kézi varrógép - a meghajtó rögzítése és javítása
A varrógép egyszerűen nélkülözhetetlen más anyagok és navit shkir varrásakor. A padlóburkolat kézi hajtásának tengelye pedig nem kéznél van, így nincs vernivaló bazhanya. Ez a helyzet azonban könnyen korrigálható, ha egyszerre vásárol egy varró elektromos hajtást a pedálból és a készletben lévő hajtószíjból. A bőr villanymotor rendszeresen felszerelhető, így kézi varrógépre is felszerelhető.
A varrógép alsó meghajtója ma múzeumi kiállítás. Sminkeld, kopogj, az a láb beázott. Előtte a gép gyakran rossz irányba indul el. Hogyan kell viselkedni, mint egy jógo vikoristannya, mint egy gép Sirály vagy Podilska akkor, mint egy egész vlashtovu? Csak be kell szerelni a varró elektromos meghajtót. Rögzítés új bőrbőrhöz Sirály. Maga az elektromos hajtás olcsóbb, mint egy új szíj a lábhajtáshoz.
A varrógép cikk-cakk előtagja egy okos rögzítés, amely egy cikk-cakk sort imitál egy Podolsk típusú egyenessorú géppel.
Ebből a cikkből megtudhatja, miért hurkol a gép vízszintes sávval, és hogyan lehet saját kezűleg kijavítani a varrósor hibáját.
A varrógép nincs megvarrva, mert a lendkerék súrlódó alátét rosszul van felszerelve, vagy a perselyek, perselyek berozsdásodtak óra közben.
A varrógép bőrmodellje eltérő lábakkal rendelkezik. Jelentés leírása vykoristannya mancsok varrógépekhez cég Janome.
A természetes bőrrel végzett munkához speciális szerszámokra, kiegészítőkre, ragasztókra és egyéb alkalmazott anyagokra lesz szüksége.
Wimogi varrógépet vezetni.
Tárgy: Elektromos hajtás varrógépekhez.
előadás 7.
A varrógépeken a munka rendkívül fontos fejekben zajlik, ha az évszakban
akár 1000 gépindítást is végrehajthat. Találhat más technológiai gépet hasonló működési móddal? A fejtengely fordulatszáma pedig akár 9000 hv -1! Sok fogaskerék nem mutat ilyen szajrét! Csillagok és speciális segítség az elektromos hajtáshoz:
1. Sebesség - épületbiztonság a gép fejtengelyén (5 - 6) 10 3 xv -1.
2. Bűnös vitrimati akár 1000 vimkneni egy évig.
3. Sima indítás, a gép fordulatszámának simább szabályozása.
4. A hajtás vezérlése - pedál a nyomást korlátozó erővel - 60 N állva és ülve 150 N-ig.
5. Mati magas K, P, D, (műhelyben túlfüstössé válik szorosan varrott varrógépek hiányában), kézzel varrott (ne zavarja a kezelőt, hogy szabadon üljön), biztonságos a robotnak, mindkettő elektromos és mechanikai kopásban.
6. A Vartist e / drive külön megbeszélés tárgyát képezheti. (Az elektromos hajtásokban, amelyek automatizáltak, több mint 30 mikroáramkör van, és ez a szórás megegyezik a gépfejével!)
A varróiparban főként háromféle elektromos hajtás létezik, a technológiai gép típusától függően:
· Kontaktorok- ha a vimikacha elfordításával vagy a pedál lenyomásával az autó azonnal felveszi az útlevél sebességét. Az indítás zökkenőmentességéhez és a fordulatszám szabályozásához nem szükséges. A halk, egyszerű, ritkán villódzó gépek stagnálásra késztetik (szövet visszatekerése, szinkronizálás stb.)
· Súrlódás- ha az aszinkron villanymotor és az ékszíjas hajtómű közé súrlódó tengelykapcsoló van beépítve, amely a pedálon működik, amely biztosítja a gördülékeny indítást és a sebesség zökkenőmentes beállítását a gép mozgása során. Ma szélesebb lehet, mind az univerzális, mind a speciális gépeken.
· automatizálás elektromos hajtás. Lehetővé teszi a gép robotjának programozását, a technológiai ciklus fő és kiegészítő műveleteinek automatikus végrehajtását. Drága és összecsukható, alacsony hatásfok. A trend pedig a jóga leváltása, bocsássuk meg a pörgős motor jó szabályozását.
Az 5. oldalon a varrógép súrlódó elektromos meghajtásának súrlódó tengelykapcsolójának blokkvázlata látható, amelyre a jelölés:
1. Aszinkron villanymotor tengelye,
2. Vezetőtárcsa, biztonságosan rögzítve a tengely végére, gyűrűs bélés nélkül, acél,
Referenciatárcsa, mindkét oldalon gyűrűbetétekkel, nagy súrlódású kopásálló anyagból.
Tárcsás rögzítés a tengelyen 6 súrlódó tengelykapcsoló.
3. A tárcsa horganyzott, nem robusztus, gyakran lebegő, így a felülete a tárcsa 3 felületében önregenerálódik vele lezárva.
4. Összenyomva a rugót, a 6 tengelyt egyszerre húzva a 3. tárcsától jobbra, amíg be nem záródik a 4. tárcsával.
5. Mufti tengely; durva illeszkedés a 7 persely bal oldali golyóscsapágyával és a jobb illesztéssel.
6. Rukhoma vízszintesen belső hüvely. Ruhaetsya a mufti testében a jobb-bal kézre egyszerre a tengelytől 6.
7. Ékszíjtárcsa, vezetőképes. A régi ipari gépekre két szíjtárcsát szereltek fel - egy kisebbet (9. poz. nincs feltüntetve) - új vagy régi gépbe történő behajtáshoz javítás céljából; 25%-kal csökkentette az autó sebességét.
10. Henger a laza persely hornyánál.
11. Két vállú fontosság.
12. Tolóerő szabályozott dozhini.
13. Indítópedál.
14. Mufti test, amely két részre van hajtva (az alábbi ábrán nem látható).
tizenöt . Promsteel gépek.
16. Egy tányért, amíg az összeállításnál a mandzsetta teste alulról csuklósan nem csukódik. A sharnirі - az utolsó gvint; szolgálja a tengelykapcsoló test rögzítését az ékszíj hajtómű megfelelő feszessége érdekében.
Donyecki Nemzeti Műszaki Egyetem
Munkaköri képesítés
A témán:
Dinamikus modell kidolgozása súrlódási variátoros hajtáshoz
Vikonav:
Diák gr. MS-03n: Kasatka P.O.
Kerivnik: Derkach O.V.
Tanácsadó: Gorobets I.O.
DONYECK 2007
ESSZÉ
Főiskolai munka: 38 oldal, 15 kis könyv, 1 melléklet, 1 táblázat, 5 dzherel.
Ehhez a bachelor robothoz dinamikus modellt kell kidolgozni a hajtáshoz, hogy megbosszuljuk a súrlódási variátort; add össze a hajtás dinamikus folyamatait leíró differenciálegyenleteket.
Követő objektum: súrlódási variátor hajtja.
Meta munka: szükséges a súrlódási variátort helyettesítő hajtás dinamikus modelljének kidolgozása a MatLab Simulink szoftvercsomag segítségével, hogy biztosítsuk az átmeneti folyamat szükséges paramétereit.
súrlódási variátor, átmeneti folyamat, differenciálszabályozás, dinamikus modell, geometriai csatolás, tehetetlenségi nyomaték
Belépés
1 Zagalni vіdomostі a súrlódási variátorokról
2 Heti adatok
3 Az érintkezési feszültség mögötti súrlódási variátor tervezési terve
4 Dinamikus modell kidolgozása
4.1 Az objektum és a folyamat szerkezeti diagramja az újban
4.2 Az illesztési modellben figyelembe vett engedmények és tényezők elemzése
4.3 Dinamikus modell
4.4 A mozgó alkatrészek tehetetlenségi jellemzőinek és a hajtóelemek keménységének megjelölése
4.5 Dinamikus modell megvalósítása Simulinkben
5 Dinamikus folyamatok elemzése az objektumban
5.1 Dinamikus folyamatok elemzése az óra területén
5.2 Dinamikus modell benyújtása az állomások teréhez közel
5.3 Modális vezérlő tervezés
Visnovok
Perelik posilan
függelék
Belépés
A legtöbb modern gépet és berendezést a következő séma szerint hozzák létre: dvigun - átvitel - munkaszerv (vykonavchiy mekhanizm). A motor és a gép munkatestei közötti köztes kapcsolat átadásának szükségessége a termelékenység növelésének, tobto feladataihoz kapcsolódik. zbіlshennya їhnёї shvidkodії.
A súrlódó sebességváltás órája a gép munkaciklusának fő órájába kerül, ami egy csapásra növeli a gép termelékenységét is. A termelékenység növelésének problémája közvetlenül összefügg a gépek dinamikus nyomon követésére szolgáló módszerek kidolgozásával, optimális paramétereinek és szerkezetének megválasztásával.
Egy további dinamikus modellhez a rendszer elemzése valós objektum részvétele nélkül történik, és ennek alapján lehetséges olyan vezérlőrendszert indukálni az objektum számára, amely feltételezi az adott vezérlőrendszer viselkedését. tárgy.
1 Általános tudnivalók a súrlódási variátorokról
A súrlódást erőátvitelnek nevezzük, a robot a súrlódás győztes erőire épül, ami a Q nyomóerő hatására két tekercstest érintkezésének tudható be.
A körkéz súrlódó fogaskerekei két fő csoportra oszthatók: a fogaskerekek szabályozatlanok, azaz. mentálisan gyors áttételekkel, az a fokozatszabályozás, amely lehetővé teszi az áttétel zökkenőmentes megváltoztatását (fokozatmentes szabályozás) (1.1. ábra).
Az egyik legegyszerűbb és legdúsabb kilengés a felületi súrlódó fogaskerekek kiegészítése, amelyet a legegyszerűbb két kerékből (kotkiv) hajtanak össze, a hajtótengelyekre rögzítve. A mozgás kovácsolás nélküli átviteléhez egy kerékre Q erőt kell hozzáadni, amely elegendő az érintkezési területen történő dörzsöléshez, amellyel a lánc ereje erősebb, mint az átvitt kerületi susilla mérete.
1.1 ábra - Elülső súrlódási variátor
A súrlódó hajtóművek előnyei: a robot simasága és zajtalansága, a tervezés egyszerűsége, a törés lehetetlensége éles változás nyomaték az egyik tengelyen a szél, a képesség, hogy nyalja a kotkіv, a képesség, hogy fokozatmentesen állítsa be a sebességet menet közben, sebességváltó nélkül.
Nedolіkami є: szorosan illeszkedő rögzítés szükségessége, nagy fogás a tengelyen, amely alátámasztja a szorosan illeszkedő rögzítés erejét, ami növeli a méretüket és terjedelmessé teszi a sebességváltót, valamint méri a az átvitt szorosság; a macskák nyalásán keresztül történő átvitel lassúsága; magas értékcsökkenés miatt.
A súrlódási variátorok mind a kinematikai, mind az erőátvitelben megállnak a vibrációban, ha fokozatmentes sebességszabályozásra van szükség (a sebességváltó nem enged ilyen szabályozást). A súrlódó variátorokat szerszámgépekben, szeszgépekben, ipari és szállítógépekben, halálos eszközök és fémmegmunkáló gépek hajtásaiban, robotokban és manipulátorokban, digitális foltvarró rendszerekben, állami erőműben és más típusokban használják.
A súrlódási variátorok, mint fokozatmentes szabályozók értéke és sebességnövekedése széles front kapcsán a rezgési folyamatok szabályozásának automatizálásától működik.
A súrlódó variátor egyik kovácsolása jaki acélból (40, 50, ShKh15 stb.), a másik szürke chavunból, textolitból, rostból és egyéb műanyagokból készül.
Háromféle súrlódásmentes fogaskerekes, tömör testű torziós frontális súrlódási variátor a legegyszerűbb szerkezetileg. Egy ilyen variátorral lehetséges a kereket a tengely mentén egyenes vonalakban mozgatni, nyilakkal jelezve, hogy melyik sebességfokozattal a váltás simán megváltozik a tárcsa munkaátmérőjének megváltozásához.
A variátor geometriai kovácsolását a következő képlet határozza meg:
"+" jel - a hajtókerékhez, "-" jel - a meghajtó lemezhez (1.2 i b ábra),
de - a tárcsa sugara, a maximális kovácsolásnál;
b a lemez szélessége.
1.2. ábra – Elülső súrlódási variátor:
a) vezetőkerékről; b) a meghajtóból
Az elülső variátorok fő hiányossága egy nagy geometriai kovácsolás, amelyet az erőátviteli arány szabályozási tartományában fel kell cserélni.
Vezetékes kerék esetén a sugár a következő képlethez van hozzárendelve:
A tervezés során rozrahunka elfogadja:
A zcheplennya készletének együtthatója;
A lemez minimális működési sugara.
Az acél súrlódó kerekek munkafelületei Ra 0,63...0,32 mikron rövidséggel vannak polírozva.
A járványügyi kovácsolás elkerülése érdekében a korong központi részét nem sikerült nyomon követni.
Az érintkezési feszültséget a tárcsa minimális átmérőjén kell elvégezni, amikor a legnagyobb nyomóerőre van szükség, és a kovácsolás eléri a legnagyobb értéket.
1.3 ábra - Tolótartozékok: a) csavar; b) kulkove
2 Heti adatok
Ki kell nyitni az elülső súrlódási erőátvitelt a sávos szállítószalag meghajtásához az elme számára, hogy a huzalkerék a P = 2 kW feszültséget ω1 = 90 rad / s végsebesség mellett továbbítsa a hajtott keréknek, amely az végsebesség ω2max = 45 rad/s.
Megfogó rögzítésként csavaros rögzítőelemet választunk, amely biztosítja az állandó fogóerőt.
A kerék anyaga hozzá van rendelve: a kisebb PTK textolit, a nagyobb acél 45.
Az átadási arány szabályozási tartományát elfogadjuk
Az átvitel a következő képletnek köszönhető:
Mn nyomaték, amelyet a hajtókerék továbbít
Ahhoz, hogy az adott, kerületi erővel kifejezett feszességet át lehessen vinni, az elmét a macskák közötti dörzsöléssel kell biztosítani.
de β a láncállomány együtthatója, β=1,3.
A veszteség pillanatát a következő képlet jelöli:
3 A súrlódási variátor tervezési terve
érintkezési feszültség szerint
A kisebb kerék d1 átmérője az érintkezési anyag szempontjából jelentős. A zchelennya állományának együtthatója β = 1,3; a leghosszabb érintkezési vonal veszteségi együtthatója f=0,3; megengedett érintkezési nyomás (textolit acélon) [σ]k = 70 N/mm2, rugalmassági modulus a kisebb keréknél (textolit) E1=6x103 MPa, a nagyobb keréknél (acél) E2 = 2,15x105 MPa.
Az E rugalmassági modulus vezetése a következő képlethez:
Beállítási tartomány:
A tervezésnél rozrahunka elfogadja
Szerkezetileg a lemez maximális átmérője:
Geometriai kovácsolás hajtókerékkel:
Іnshі razmіri kolіs priymayut konstruktívan.
4 Dinamikus modell kidolgozása
4.1 Az objektum blokkvázlata
Ez a rendszer egy villanymotorból áll, amely létrehozza az Mn motor nyomatékát, a tengelykapcsolót, a hajtókeréket, a hajtott tárcsát, a csapágyakat és a munkatestet. A motor egy forgási pillanatot hoz létre egy ω forgócsuklóval, amelyet egy vezetékes keréken lévő tengelykapcsolón keresztül továbbít egy új vezetőtárcsáról, majd egy működő testre (3.1. ábra). A csavaros rögzítés biztosítja a fordulási pillanat átvitelét.
4.1 ábra - Rozrahun séma a meghajtóhoz.
4.2 A modell létrehozásának órájára elfogadott pótlékok elemzése
A modell összeállításához egy villanymotort veszünk, amely biztosítja az állandó nyomatékot, amelyet meg kell forgatni, z η = 0,98, golyóscsapágyak η = 0,99 és görgőscsapágyak z η = 0,97. A kerék és a tárcsa deformációi nem sérülnek meg.
4.2 ábra - Elülső sebességváltó modell
4.3 Dinamikus modell
A modellnek 4 szabadságfoka lehet, és a modellbe belépő ruh-t az eredmények alapján a hajtás dinamikus paramétereiből vett differenciálegyenlőség-rendszer írja le. A differenciálegyenlőség rendszere látható:
de Is, Ip - a motor és a munkatest becsomagolt részeinek indukciós tehetetlenségi nyomatékai;
I1, I2 – a kerék és a tárcsa tehetetlenségi nyomatékának megfelelő indukálása;
φs, φp, φi a körbefutó tömegek csúcskoordinátái;
Мn - a hajtóerők nyomatéka (dvigun);
Mo - a támasztó erő nyomatéka (a munkatesté);
c1, c2 - a tengelyek keménysége;
k1, k2 – csillapítási együttható;
ε - geometriai kovácsolás.
Három differenciálvonalat, amelyek a hajtás viselkedését írják le a robotizált folyamatban, egy dinamikus modellből állították össze. Dali vykonuєmo doslіdzhennya hajtogatott modell. A modell egyfokozatú befecskendezéssel készült, amelyet a motor tengelyére fecskendeznek be.
4.4 A rukhlivy tehetetlenségi jellemzőinek megjelölése
a meghajtó elemek részei és keménysége
A körbefonódó lábak tehetetlenségi pillanatai rózsafüzér utat jeleznek. A beburkolt motoralkatrészek tehetetlenségi nyomatéka:
A munkatest beburkolt részeinek tehetetlenségi nyomatéka:
A kerék tehetetlenségi nyomatéka:
A tárcsa tehetetlenségi nyomatéka:
A tengelyek Razrahuemo keménysége:
- 2. típusú rugós modulus (zsuvu),
A bordás tengely keménysége:
A gwent keménysége:
4.5 Dinamikus modell megvalósítása Simulinkben
A nemlineáris dinamikus rendszerek modellezésére szolgáló kiegészítő interaktív Simulink rendszer differenciálegyenlet-rendszere (4.3. pont) alapján elkészítjük egy súrlódási variátoros hajtás dinamikus modelljének diagramját (4.3. ábra). A változások jelentését a dinamikus modell sémájához hasonlóan a 4.1. táblázat tartalmazza.
4.1. táblázat – A győztes változtatható megnevezések
dinamikus modellben
| Leírás | Időpont egyeztetés | Rendszer | Od. |
| A körbefutó motoralkatrészek tehetetlenségi nyomatéka | Is | ||
| Vezető tehetetlenségi nyomatéka a munkatest becsomagolt részleteinek. | IP | ||
| A kerék tehetetlenségi nyomatéka | I1 | ||
| A tárcsa tehetetlenségi nyomatéka | I2 | ||
| Csomagolómaszkok levágási koordinátái | - | rádium | |
| A hajtóerők pillanata (dvigun) | Mn | N*m | |
| Az erők támogatásának pillanata (dolgozó test); | Mo | N*m | |
| A bordás tengely keménysége | s 1 | N/m | |
| A gwent keménysége | c2 | N/m | |
| csillapítási tényező | k1 | - | |
| csillapítási tényező | k2 | - | |
| Az állomány együtthatója | β | b | - |
| geometriai kovácsolás | ε | e | - |
4.3 ábra - Dinamikus modell megvalósítása Simulinkben
Kilépési adatok:
5 Dinamikus folyamatok elemzése az objektumban
5.1 Dinamikus folyamatok elemzése az óra területén
A grafikonok elemzéséből kitűnik, hogy az objektumok tehetetlenségi erején keresztül
az erőrugók, a geometriai kovácsolás és a tertya szilárdsága révén javul a rendszer felosztása. A tárcsa elmozdulása a nyomatékprogram első másodpercében, a motor tengelye gyakorlatilag nullával egyenlő (5.1-5.4. ábra).
Ezt a tengely és a csavar rugóereje, valamint a kerék és a tárcsa tehetetlenségi ereje ihlette, az indítás pillanatában a burkolat felteker, majd amikor a nyomatékot elfordulásra állítjuk, a tárcsaburkoló megcsúszik a pillanat.
5.1 ábra – A vágás mélysége a motortengely forgásáig (rad) óránként (s)
5.2 ábra - A kuta esése a kerék fordulatáig (rad) óránként (s)
5.3 ábra – Kuta-függés a lemez forgásától (rad) óránként (s)
5.4. ábra - A kuta függetlensége a munkatest forgásától (rad) óránként (s)
5.2 Dinamikus modelladatok
a táborok területén
A differenciálegyenletekkel leírt dinamikus modell vagy mátrixegyenletek formájában (A, C, D mátrixok) vagy átviteli függvény formájában is bemutatható. Mivel a modell 4 szabadságfokkal rendelkezhet, ezért Laplace transzformációja szükséges a mű átviteli funkciójának zökkenőmentes kiküszöböléséhez. Ehhez elképzelhetünk egy modellt mátrixok formájában, a vikoristovuchi їх rozrahunka іinteraktív rendszer MATLAB.
A dinamikus modell differenciális igazítása:
Újrakészítjük a rendszert.
Képzeljünk el egy modellt mátrix formában:
Vezessük be a következő definíciót:
A dinamikus modell így néz ki:
Szorozzuk meg a kapcsolat sérült részeit a visszatérési mátrixszal:
Visszatérési mátrix a MATLAB súgóhoz:
L=;
F=[-k1 k1 0 0; 0-k1 k1 0; 0 k2-k2 0; 0 0 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Szorozzuk meg az inverz mátrixot a mátrixszal:
R=[-c1 c10 0; c1-c1 0 0; 0 0 -c2 c2; 0 0 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Szorozzuk meg az inverz mátrixot a mátrixszal:
K=;
Az A, B, Z, D mátrixok így nézhetnek ki:
Mutassuk be a MATLAB M-fájl mátrixának kivonását és a dinamikus modell átviteli függvényének kivonását, hogy leírjuk a modell válaszát a csíkszerű injektálásra (5.5., 5.6. ábra).
A=;
B=;
Az átviteli függvény így nézhet ki:
W(s) = (-2,132e-014 s^7 + 16,39 s^6 + 6,586 s^5 + 3,275e004 s^4 - 2343 s^3- 6,166e006s^2 - 7,573e004 s^7 +e 1,101 s^7 + 5156 s^6 + 3080 s^5 + 6,401e006 s^4 + 6,915e005 s^3 - 1,742e008 s^2 - 2,015e007 s + 2,25e)-007
5.5. ábra - Átmeneti folyamat dinamikus modellben
5.6. ábra - Amplitúdó-fázis-frekvencia és fázis-frekvencia jellemzők
A grafikonok elemzéséből látható, hogy a modell kogenerációja növekszik és nem áll meg. Ezért szükség van egy szabályozó (korrekciós lanka) tervezésére (5.7. ábra), hogy a dinamikus modell kicsi legyen, az átmeneti folyamat során elhalványul, egy kis nyugalom (1-5 másodperc) nem több túllövéssel. mint 10-15%.
5.7 ábra - Dinamikus modell modális vezérlővel
5.4 Modális vezérlő tervezés
A modális szabályozó létrehozásának ötlete azon alapul, hogy ezt az együtthatót úgy kell kiválasztani, hogy a szabályozás zárt hurkának pólusa az árnyékolt területen ellentétes legyen. Gondoskodni kell az átmeneti folyamat során az elhalványuló coliról és egy rövid órás nyugalomról, legfeljebb 10-15%-os túllépéssel (5.7. ábra).
5.8 ábra - Az acélrendszerek oszlopainak hornyolási területe
A modális szabályozó ösztönzéséhez újra kell ellenőrizni a modell keratinizációját.
A keratinizáció újbóli ellenőrzése Kalman további kritériuma szerint történik:
Ha az Ss(n,n)= négyzetmátrix rangja megegyezik az n mátrix rendjével, akkor az A,, C, D mátrixokkal leírt modell Kerovian. A dinamikus modell mátrixának sorrendje fejlettebb 8.
A mátrix rangja egy négyzetmátrix maximális mérete, amelynek előjele nem egyenlő nullával.
A mátrix rangja egy további függvényhez rendelhető rang MATLAB-ban:
A dinamikus modell A mátrixának rangja a sorrendben van, a Kerovan modell is.
A kiválasztási módszer egy zárt áramkör új átviteli függvényéhez rendel pólusokat. A MATLAB segítségével megismerheti a modális vezérlő együtthatóját, és átveheti az átmeneti folyamatot a dinamikus modellből a vezérlővel (5.9. ábra).
p=[-7-0,2i-7+0,2i-5-0,5i-5+0,5i-5-6 -17-10];
sysE=ss(A-B*k,B,C,D);
A modális vezérlő együtthatója:
k=[-237,0116 237,0565 173,5746 -185,8740 8,6474 -8,5860 16,0462 14,2642].
Az 5.7 grafikon elemzéséből látható, hogy a rendszer átmeneti folyamata túllövés nélkül 2,5 másodpercen belül véget ér.
5.9 ábra - Átmeneti folyamat egy szabályozóval rendelkező dinamikus modellhez
Visnovok
Mely robotok fejlesztettek ki dinamikus folyamatokat, melyeknek van súrlódási variátoros hajtása. Megtörtént a kimenő adatok kiválasztása, a súrlódási variátor tervezési kialakítása, a mozgó alkatrészek tehetetlenségi jellemzőinek és a hajtóelemek keménységének meghatározása.
Bula összeállította a vizsgálandó objektum blokkdiagramját, a dinamikus modell matematikai leírását, amely lehetővé teszi a rendszer számára, hogy egyetlen támadás esetén megváltoztassa a rendszer viselkedését.
A megfigyelési terület objektumaiban és a táborok területein zajló dinamikus folyamatok elemzésére is sor került. Modális vezérlő tervezése, amely egy dinamikus modell átmeneti folyamatának 2,5 másodperc alatt történő befejezését biztosítja.
Irodalom
1. Guzenkov P.G. A gép adatai: Navch. egyetemek számára. - M.: Viscs. iskola, 1986. - 359 p.
2. Bakaev N.A., Voloshina O.M. A súrlódó hajtóművek tervezésének alapjai. - A Rosztovi Egyetem bemutatása, 1985. - 176 p.
3. Pronin B.A., Revkov G.A. Bezstupіnchastі klinopasovі és friktsіynі adások. - M.: Mashinobuduvannya, 1980. - 320 p.
4. Komarov M.S. Mechanizmusok és gépek dinamikája. Gépgyártás, M., 1969.
5. Ivanov E.A. Csatolások Mashgiz, M, 1959.
56a osztály, 55 g 145832 sz
Kártyás csoport M 284
V. A. Piscsikov
A varrógép súrlódásos hajtása
1961. március 28-án igényelték. az M 724039/28 „12. sz. a Borászok Jogával és a Vodkritival foglalkozó Bizottságnál az SRSR sugárzási minisztereinél
Elősegítik a varrógép súrlódó hajtását, amely egyszerűbb a kialakítása és a lendkerék tehetetlenségi erőinek kompakt és negatív befecskendezése a varrógép rezgésének indításakor.
Konstruktív a PoleAє friccine játékának sütése, annak érdekében, hogy Scho Vіn a SKIV vezetőjét, Zemontovaniya a Cullete pіdshipnikіv befejezéséhez fordítja a gép testére egy kábelgörgő görgővel, Zovnіshnє Kilnoy Elang, Providci Elang, borotválkozzon át a hengereken. a csapágy belső gyűrűjének felcsavarása, a gép fejtengelyéhez rögzítve.
Kulkov_ csapágyak (egy lp obdva) vannak felszerelve a gép testére egy további menetes perselyhez, a gépkés pedáljához kötve.
A karosszéken a súrlódó hajtás pronációjának sematikus ábrázolása látható.
Az 1. szíjtárcsa (lendkerék) szilárdan meg van erősítve a 2 db kúpos standard görgős szögérintkező csapágy külső gyűrűjén, a 8. csapágy belső gyűrűje szilárdan a varrógép 4 fejtengelyén van rögzítve. Speciálisan a szabványos helyett készült b elválasztó, amely a géptesthez vagy alkatrészhez van kötve, szorosan a testhez van kötve, például egy menetes csapágypersellyel, amely átviszi a susilla tengelyét; egyébként a 9 csapágygyűrűt egy 1 szíjtárcsa rögzíti.
Így a súrlódó hajtás biztonságos lesz a gép bekapcsolásakor, és a sebesség eléri a maximális fordulatszámot, másrészt a gép rezgési órájának bekapcsolásakor a legkisebb egyenlő a gép rezgésével a hajtások leállásából.
A borkészítés hatálya alá tartozik
1. Friczіniy Vіdd Schweinja Machini, Vіdomiy Tim, Shah, scho, A kontextus kontextusának módszerei, Vіn önmagában alakítja Shkіv lövészét, Zemontovaniy a további Culite pіdshipnikіv a Mozhlivіstezze hadtestén. tengelye a Kilkoloviy P_DSHIPNIK, Zovnіshnє Kiltsy Kötelezettségei tengelye egy vezető elem, amely a görgőkön keresztül van meghajtva, és a géptesthez van rögzítve, a csapágygyűrű közepén lévő elválasztó, amely a csapágy főtengelyéhez van rögzítve. a gép.
2. Hajtsa meg az 1. bekezdést, l és h és y shy tim esetén az OS számára „a szíjtárcsa mozgásában a golyóscsapágyak egyik vagy másik - az autó karosszériájára szerelve egy további menetes perselyhez, a lábpedálhoz kötve
Rendes A. V. Nechaikin
Techred T. II. 1 urilko Lektor V. M. Andrianova
V. szerkesztő, St Haaova
-ig, psch-ig. 1,111-62 r. Boom formátum. 70; 108/,. Hangerő 0,18 nézet. l.
Zach. 2709 Forgalom 500 Ára 4 kop.
TsBT1ch A bizottságnak a bizottság jobb és jobb oldalán
Moszkva, Center, M. Cherkasky prov., D. 2/b.
Drukarnі TsBT11, Moszkva, Petrivka, 14
A széles szabályozási tartományú súrlódó hajtások követik a differenciál áramkört.
A súrlódó hajtások túlméretezettek a kísérleti telepítésekhez.
Svіtlozarov fokozatmentes súrlódó hajtása.
Rozrahunok súrlódó meghajtó alapjait a megoldás, otrimanuyu schee Euler a gnuchkoi giuchkoi menet. Miután megbántottak egy nőt, egy és ugyanaz, egy és ugyanaz, egyszerre néztek egymásra egy csomó cérnával, ami ruganyos lehet.
A súrlódási hajtás hatékonyságát a vontatási együttható határozza meg.
A súrlódó hajtásoknál a vonóerőt a hajtóelemet dörzsölő erővel egy rugalmas szervre (öltés, kötél, lándzsa) adják át. A súrlódó hajtás öltésekre és kötelekre énekel, többet jelent - a lándzsák számára.
| Grafika módosítása. |
A csutka súrlódásos meghajtásánál a feszítés a már kijelölt megjelölés, valamint a fejfokozat kivételével szükséges ahhoz, hogy a vonóelem és a hajtóegység peremének megfelelő kapcsolóereje létrejöjjön. Ebben az esetben a yogo értékét a vonóerő értéke és a hajtás paraméterei határozzák meg.
A súrlódó hajtások normál működését a beépített feszítőtartozékok (div. Ch.) tekercselése biztosítja Rövid álló (60 m-ig), tekercselő, visszahúzható és hordozható szállítószalagokon a mechanikus feszítőszerelvények felszerelése.
A súrlódó hajtású Mlin-ek (Sh-25, Sh-70) két hajtógörgővel és két műanyag olajjal ellátott támasztógörgővel vannak felszerelve.