Šijací elektrický pohon, či už ide o priemyselný stroj, nemusí mať len inú konštrukciu na nastavenie rýchlosti (trenie), ale aj iný elektrický obvod, princíp činnosti elektromotora.
Niektoré modely elektropohonov môžu mať nízku spotrebu od 40 do 110 W, nízkorýchlostné ovíjanie a asynchrónny typ robotického motora. Inými slovami, pobutový elektromotor nevykazuje veľké a triviálne inovácie a vimagaє pravidelné "opravy". Šijací stroj priemyselného stroja je možné prevádzkovať bez prerušenia, bez prehrievania a bez plytvania teplom.
Ak potrebujete stroj na hromadné šitie, myslite len na dobrý pohon. Za goloshennyami si môžete kúpiť lacno použité stoly z motorov vydania Radyansky. Tse nadіynі a pratsezdatnі elektroprivodі a môžete vyhrať nasledujúce. Ale vrahuyte, scho všetok smrad pracovať ešte hlasnejšie, a žiadna regulácia hluku sa nestratí. Preto vám odporúčame včas doniesť napríklad oceľ a olovo, ktoré sú súčasťou súpravy k šijaciemu stroju Typical. Ja sám som takýto šijací elektrický pohon údajne recenzoval v tomto článku.

Môžete si kúpiť šijací elektrický pohon od spoločnosti Typical a nainštalovať ho na akýkoľvek druh priemyselného štýlu, ale je lepšie kúpať jogu v súprave so stolom, častejšie je samotný štýl pre dvigun lacnejší.
Mimochodom, k šijaciemu stroju na mieru sa dá kúpiť šikovná šijacia ocieľka. Zruchny priestranstvo ocele, a zároveň, rozkrіyny šitie ocele, aby vaša práca pohodlné, čo obov'yazkovo podpísať na náladu a je životaschopný na úrovni práce. Aj keď máte možnosť šiť veľa, nenechajte sa takým „dribnitsom“ oklamať.

Navit taký nepodstatný detail ako vimikach na elektrický pohon vytvára pohodlie v robote a vlieva do nálady.
Napätie elektromotora a napätie
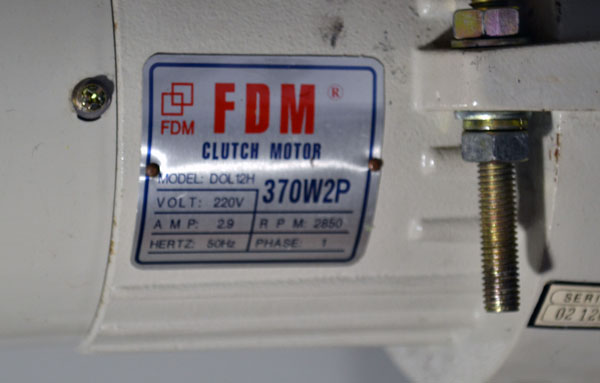
Na prednej strane motora je štítok označujúci napnutie meradla a tesnosť motora.
Ak sa rozhodnete nainštalovať auto doma alebo v malom štúdiu, kde nie je 380 V zásuvka, vyberte si elektromotor pre robota s 220 V.
A tesnosť motora tento zadok nemôže mať osobitný význam, oskolki shvidk_st robotov a strojov spočívajú v iných faktoroch. Povedzme si o nich trocha nižšie.
Čo je to trecí pohon? Ak riadite auto, potom ste zodpovední za to, že viete, že takéto spojenie. Takže os trenia elektrického pohonu šitia je podobná.
Motor sa otočí postupne s veľmi swidkistyu. Pri stlačení pedálu sa kotúč trecieho nástavca (Ferado) s textolitovými doštičkami zdvihne k zotrvačníku motora a interaguje s ním. Čím viac pritlačíte trecí kotúč k zotrvačníku elektromotora, tým lepšia je spojka a tým väčšia rýchlosť. K tomu sa niekedy pri suchej práci na pravidelnej šírke objaví vôňa vypáleného textolitu.
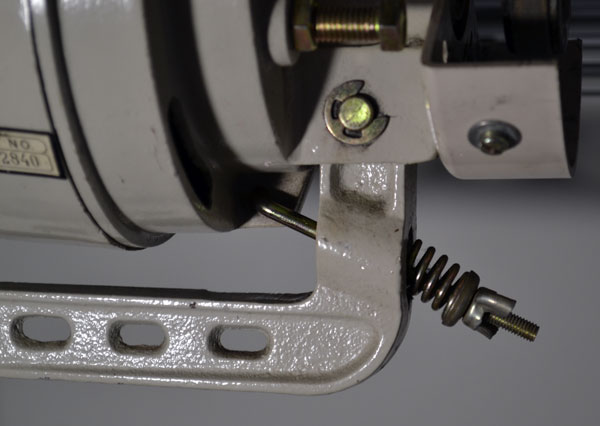
Voľnobežné kroky (bez susilla) pedálu k pohonu sú regulované skrutkou.
A os je s dvojitými skrutkami, presnejšie dvoma skrutkami (z spásonosná stránka ešte jeden) galma je regulovaná. Takže samotná galma mayzhe je ako auto.
Ak pracujete na vysokej swedishness, potom po zuboch šijacieho stroja, pre zotrvačnosť, budete pokračovať v balení. To chce galmo, ako keby to vyznievalo ako už tak nevhodné balenie. Os cim je skrutka s poistnou maticou a krok ostrosti galm je regulovan.
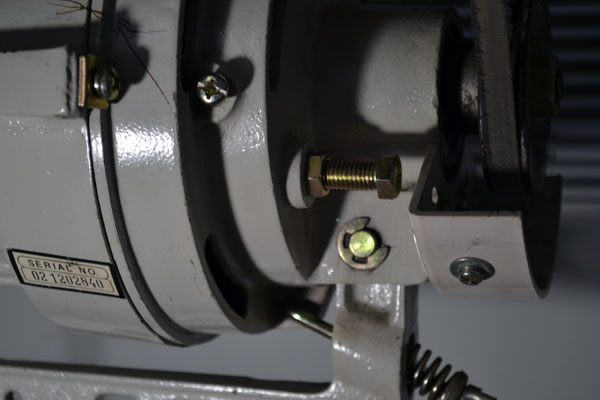
Fotku trecej spojky motora sme nezverejňovali, opravu motora má na starosti elektrikár, ale je potrebné nastaviť robota vlastnými rukami.
Tu je lepšie nastaviť výšku pіdёm chi kut nakhil pedálu.
Vіd chto položiť swedkіst robotického priemyselného šijacieho stroja

Rýchlosť robota a priemyselného šijacieho stroja by mala byť u nás uložená pred počtom ovinutí elektromotora. Tento parameter nájdete na výmenníku alebo v pase pohonu. Ale je menej pravdepodobné, že takéto detaily budú poškriabané špecialistami na továrenské šitie. Pri iných strojoch je tento parameter robotického motora iný, radenie prevodových stupňov je ďalším spôsobom regulácie otáčok robotického šijacieho stroja.

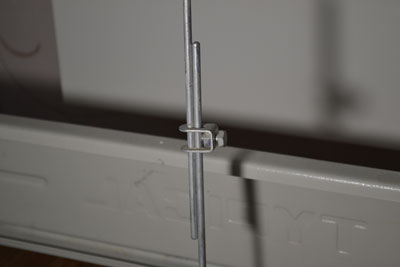
A pre samotnú pomoc vymeňte kladku motora. Čím väčší je priemer kladky, tým obmedzenejšia je rýchlosť robotického šijacieho stroja.
Nie je jednoduché meniť kladky, na ktoré je potrebný kľúč na 19 a samotnú kladku, ktorý zvuk vydáva motor. Ale počkaj, ak si náhodou upravuješ dĺžku hnacieho remeňa a ak máš veľké výkyvy, možno máš menší priemer.

Aká dobrá výslovnosť priniesla, taká moderná, môže byť nehlučná a krásna ako typická spoločnosť, ale nepotrebujete to. Tse vіdnositsya na shvachok-domáce úlohy. Smradky sa často praktizujú doma na priemyselných šijacích strojoch, ako je trieda 1022, trieda 97. Z troch rôznych dôvodov, no v prvom rade ich nemôže poraziť hluk roboty a smrad.
Aby ste tento problém vyriešili jednoducho a lacno, kúpte si elektrický pohon TUR-2 a nainštalujte ho priamo na telo priemyselného stroja. Nie je možné vysvetliť, ako ho nainštalovať, z pohľadu pokožky je možné poraziť svoje vlastné rozhodnutie. A môžeme tiež urobiť, ak je to potrebné, vymeniť zástrčku a spájkovať tyče, ako je znázornené na fotografii.
Okrem toho, ak takýto motor musí spájkovať polohu vinutí hmlou, motor bude zabalený v iný deň. Budete radi, keď budete pripojený k takémuto overlockovému pohonu.
Ale napriek tomu sa kvôli uznaniu iba pre elektrikárov neodporúča fanúšikom Ukrajiny, aby nezávisle odoberali motory, a preto by už nemalo byť žiadne spájkovanie minyat. Nielenže nie som priamo v bezpečí pred útokom brnkania, ale som aj závislý. Vaughn sa prejavuje v trivej hodine. V prípade prehriatia vinutí motora ho naviňte na nepracujúcom stanovišti šijacieho stroja, ale dá sa pripojiť na okraj vinutí.
Na priemyselné stroje je možné inštalovať aj elektromotory iných značiek, odporúčame však len nami recenzované a samotný elektropohon TUR-2.
A nezabudnite, že rýchlosť robotického písacieho stroja je výrazne znížená a šitie na ňom môže byť krátkodobé, veľké prestávky (pauzy).
Niekedy musíte nájsť šijací stroj, presnejšie povedané, odstrániť plastové puzdro stroja, aby ste získali prístup k ďalším uzlom. Takáto potreba obviňovať je ešte zriedkavejšia a obviňovať ju len vtedy, ak je potrebné vymeniť elektromotor šijacieho stroja a hnací remeň. Vtіm, ak chcete vymeniť elektrický pohon, niekedy odstráňte spodný kryt. A os by mala byť "zaseknutá", budete musieť znova vyzdvihnúť stroj.
V tomto článku viete, ako zistiť príčinu poruchy elektrického pohonu, ako aj ako samostatne vymeniť elektromotor.
Zvuk Problémy elektrického pohonu šitia spôsobujú pedále, nie elektromotor. Neodporúča sa samostatne zdvihnúť pedál. Dávajte pozor na pedál, šípky nekrútite, „nestojte“ na nich nízkym štýlom a majte na pamäti, že cez tieto šípky by mala prechádzať elektrická prúdnica s napätím 220 voltov.

Ručný šijací stroj - pripevnenie a oprava pohonu
Šijací stroj je jednoducho nepostrádateľný pri šití iných látok a navit shkir. A os ručného pohonu podlahy nie je po ruke, takže nie je potrebné poraziť bazhanya. Táto situácia sa však dá ľahko napraviť, ak si v súprave kúpite šijací elektrický pohon naraz z pedálu a hnacieho remeňa. Kožený elektromotor je možné namontovať pravidelne, čo vám umožňuje nainštalovať ho na ručný šijací stroj.
Spodný pohon šijacieho stroja je dnes muzeálnym exponátom. Make up, klop, tá noha je premočená. Predtým sa stroj často začne otáčať nesprávnym smerom. Ako sa správať ako jogo vikoristannya, ako stroj Čajka alebo Podilska vás ako celok vlashtovu? Potrebujete iba nainštalovať elektrický pohon šitia. Zapínanie na novú koženú kožu Čajka. Samotný elektrický pohon je lacnejší ako nový remeň pre nožný pohon.
Cik-cak predpona na šijací stroj je šikovný nástavec, ktorý napodobňuje cik-cak riadok s jednoduchým rovným strojom podolského typu.
V tomto článku viete, prečo sa stroj krúti pomocou vodorovnej lišty a ako opraviť chybu v šijacom rade vlastnými rukami.
Šijací stroj nie je ušitý, nakoľko je nesprávne namontovaná trecia podložka zotrvačníka, alebo sú po hodine tvrdej práce zhrdzavené puzdrá a puzdrá.
Kožený model šijacieho stroja má inú sadu nôh. Nahlasit popis vykoristannya labky pre šijacie stroje firmy Janome.
Pre prácu s prirodzenou pokožkou budete potrebovať špeciálne náradie, nástavce na inštaláciu príslušenstva, lepidlá a iné aplikované materiály.
Wimogi na pohon šijacích strojov.
Predmet: Elektrický pohon pre šijacie stroje.
prednáška 7.
Na šijacích strojoch sa v priebehu roka pracuje v mimoriadne dôležitých mysliach
vykonať až 1000 spustení stroja. Nájdete iný technologický stroj s podobným režimom prevádzky? A otáčky hlavového hriadeľa sú až 9000 hv -1! Veľa prevodov nepredvádza také swagy! Hviezdy a špeciálna asistencia k elektrickému pohonu:
1. Rýchlosť - stavebné zabezpečenie na hlavovom hriadeli stroja (5 - 6) 10 3 xv -1.
2. Vinní vitrimati do 1000 vimkneni za rok.
3. Hladký rozbeh, plynulejšia regulácia otáčok stroja.
4. Ovládanie pohonu - pedál s obmedzujúcou silou tlaku naň - 60 N v stoji a v sede až do 150 N.
5. Mati vysoké K, P, D, (v dielni sa pri absencii pevne zošitých šijacích strojov prehnane zadymí), ručne šité (neobťažujte obsluhu voľne sedieť), bezpečné pre robota, oboje v el. a pri mechanickom opotrebovaní.
6. Vartist e / drive môže byť predmetom špeciálnej diskusie. (V elektrických pohonoch, ktoré sú automatizované, je viac ako 30 mikroobvodov a tento rozptyl je ekvivalentný rozptylu hlavy stroja!)
V šijacom priemysle existujú najmä tri typy elektrických pohonov v závislosti od typu technologického stroja:
· Stýkače- ak otočením vimikachy alebo stlačením pedálu auto okamžite naberie pasovú rýchlosť. Pre plynulosť rozbehu a reguláciu otáčok to nie je potrebné. Na tichých, jednoduchých strojoch, ktoré len zriedka blikajú (prevíjanie látky, dabovanie atď.)
· Trenie- ak je medzi asynchrónnym elektromotorom a prevodovkou s klinovým remeňom nainštalovaná trecia spojka, ktorá pôsobí na pedál, čo zaisťuje plynulý rozbeh a plynulé nastavenie rýchlosti pri pohybe stroja. Dnes môže byť širší, a to ako na univerzálnych, tak aj na špeciálnych strojoch.
· automatizácie elektrický pohon. Umožňuje naprogramovať robota stroja, automaticky vykonávať hlavné a doplnkové operácie technologického cyklu. Drahé a skladacie, nízka účinnosť. A trendom je nahradiť jogu, odpusťme si dobrú reguláciu rýchleho motora.
Na malej 5 je uvedená bloková schéma trecej spojky trecieho elektrického pohonu šijacieho stroja, pre ktorú je označenie:
1. hriadeľ asynchrónneho elektromotora,
2. Vodivý kotúč, bezpečne pripevnený na konci hriadeľa, bez prstencových obložení, oceľ,
Referenčný kotúč s obojstrannými prstencovými podložkami, vyrobený z materiálu odolného voči opotrebovaniu s vysokým trením.
Upevnenie kotúča na hriadeli 6 trecia spojka.
3. Disk je pozinkovaný, nerobustný, často plávajúci, takže jeho povrch sa v povrchu disku 3 po uzavretí samoobnovuje.
4. Tlačná pružina, ťahaním hriadeľa 6 naraz z kotúča 3 sa zlomí doprava, kým sa nezatvorí kotúčom 4.
5. Mufti hriadeľ; hrubé uloženie s ľavým guľôčkovým ložiskom objímky 7 a pravé uloženie.
6. Rukhoma horizontálne vnútorný rukáv. Ruhaetsya v tele muftiho do pravej a ľavej ruky naraz z hriadeľa 6.
7. Remenica klinového remeňa, vodivá. Na starých priemyselných strojoch boli nainštalované dve kladky - menšia (poz. 9 nie je znázornená) - na zabehnutie nového alebo starého stroja na opravu; dosiahlo zníženie rýchlosti auta o 25 %.
10. Valček v drážke voľnej objímky.
11. Dvojramenná dôležitosť.
12. Ťah regulovaný dozhini.
13. Štartovací pedál.
14. Telo Mufti, ktoré je zložené na dve časti (nie je znázornené na obrázku nižšie).
15. Stroje Promsteel.
16. Doska, kým telo objímky na zostave nie je sklopné zospodu. Na sharnirі - posledný gvint; slúžia na upevnenie telesa spojky v požadovanej polohe pre správnu tesnosť prevodu klinovým remeňom.
Doneckej národnej technickej univerzity
Pracovná kvalifikácia
K téme:
Vývoj dynamického modelu pre pohon s trecím variátorom
Vikonav:
Študent gr. MS-03n: Kasatka P.O.
Kerivnik: Derkach O.V.
Poradca: Gorobets I.O.
DONECK 2007
ESAY
Bakalárska práca: 38 strán, 15 malých kníh, 1 príloha, 1 tabuľka, 5 dzherel.
Pre tohto bakalárskeho robota je potrebné vyvinúť dynamický model pohonu, aby sa pomstil trecí variátor; sčítajte diferenciálne rovnice, ktoré popisujú dynamické procesy pohonu.
Nadväzujúci objekt: poháňaný trecím variátorom.
Meta práca: je potrebné vyvinúť dynamický model pohonu na výmenu trecieho variátora pomocou softvérového balíka MatLab Simulink, aby sa zabezpečili potrebné parametre prechodového procesu.
trecí variátor, prechodový proces, diferenciálne vyrovnanie, dynamický model, geometrická väzba, moment zotrvačnosti
Vstup
1 Zagalni vіdomostі o trecích variátoroch
2 Týždenné údaje
3 Konštrukčný návrh trecieho variátora za dotykovým napätím
4 Vývoj dynamického modelu
4.1 Schéma štruktúry objektu a procesu v novom
4.2 Analýza opravných položiek a faktorov, ktoré sa zohľadňujú v párovacom modeli
4.3 Dynamický model
4.4 Označenie zotrvačných charakteristík pohyblivých častí a tvrdosti hnacích prvkov
4.5 Implementácia dynamického modelu v Simulinku
5 Analýza dynamických procesov v objekte
5.1 Analýza dynamických procesov v oblasti hodín
5.2 Odovzdanie dynamického modelu v blízkosti priestoru staníc
5.3 Návrh modálneho regulátora
Višňovok
Perelik posilan
dodatok
Vstup
Väčšina moderných strojov a zariadení je vytvorená podľa schémy: dvigun - prenos - pracovný orgán (vykonavchiy mekhanizm). Potreba prenosu medzičlánku medzi motorom a pracovnými orgánmi stroja je spojená s úlohami zvyšovania produktivity, tobto. zbіlshennya їhnёї shvidkodії.
Hodina trecieho radenia prevodov vstupuje do hlavnej hodiny pracovného cyklu stroja, čo tiež bleskovo pridáva na produktivite stroja. Problém zvyšovania produktivity priamo súvisí s vývojom metód dynamického nadväzovania strojov a voľby ich optimálnych parametrov a štruktúry.
Pre dodatočný dynamický model sa vykoná analýza systému bez účasti reálneho objektu a na tomto základe je možné navodiť pre objekt riadiaci systém, ktorý postuluje správanie sa riadiaceho systému daného objektu. objekt.
1 Všeobecné informácie o trecích variátoroch
Trenie sa nazýva prevod, robot je založený na víťazných silách trenia, ktoré je spôsobené kontaktom dvoch obalových telies pod silou prítlačnej sily Q.
Trecie prevody otočnej ruky možno rozdeliť do dvoch hlavných skupín: prevody sú neregulované, to znamená. pri mentálne rýchlych prevodových pomeroch tú prevodovú reguláciu, ktorá umožňuje plynule meniť prevodový pomer (bezstupňová regulácia) (obr. 1.1).
Jedným z najjednoduchších a najbohatších výkyvov je dokončenie povrchového trecieho prevodu, ktorý sa skladá do najjednoduchšieho výkyvu dvoch kolies (kotkiv), upevnených na hnacích hriadeľoch. Pre prenos pohybu bez kovania je potrebné pridať na jedno koleso silu Q, ktorá postačuje na trenie v kontaktnej ploche, pri ktorej je sila reťaze silnejšia ako veľkosť prenášanej obvodovej susily.
Obrázok 1.1 - Predný trecí variátor
Výhody trecích prevodov sú: plynulosť a nehlučnosť robota, jednoduchosť konštrukcie, nemožnosť rozbitia pri prudká zmena krútiaci moment na jednom z hriadeľov vetra, schopnosť lízať kotkіv, schopnosť plynule upravovať rýchlosť na cestách, bez prevodového stupňa.
Nedolіkami є: potreba tesne priliehajúceho nástavca, skvelé uchopenie hriadeľa, ktoré podporuje v božskosti silu tesne priliehajúceho nástavca, čo zväčší ich veľkosť a urobí prevod objemným, a tiež zmeria množstvo tesnosť, ktorá sa prenáša; pomalý prenos cez olizovanie mačiek; z dôvodu vysokých odpisov.
Trecie variátory sa zastavia pri kinematických aj výkonových prenosoch vo vibráciách, ak potrebujete plynulú reguláciu otáčok (prevodovka takúto reguláciu neumožňuje). Trecie variátory sa používajú v obrábacích strojoch, v likérových strojoch, priemyselných a dopravných strojoch, pohonoch smrtiacich prístrojov a kovoobrábacích strojov, robotov a manipulátorov, digitálnych prešívacích systémov, mechanizmov pre moc štátu a iných typov.
Hodnota trecích variátorov ako plynulých regulátorov a otáčky sa zvyšujú pri spojení so širokým čelom diel z automatizácie riadenia vibračných procesov.
Jeden z výkovkov trecieho variátora je vyrobený z jakských ocelí (40, 50, ShKh15 atď.) a druhý je vyrobený zo sivého chavunu, textolitu, vlákna a iných plastov.
Konštrukčne najjednoduchšie sú tri typy prevodov bez trenia s pevnými torznými čelnými trecími variátormi. S takýmto variátorom je možné pohybovať kolesom po hriadeli v priamych líniách označených šípkami, s ktorým prevodom sa radenie plynule mení na zmenu pracovného priemeru disku.
Geometrické kovanie variátora je určené vzorcom:
znak "+" - pre hnacie koleso, znak "-" - pre hnací disk (obrázok 1.2 i b),
de - polomer disku pri maximálnom kovaní;
b je šírka disku.
Obrázok 1.2 - Predný trecí variátor:
a) z vodiaceho kolesa; b) z pohonu
Hlavným nedostatkom predných variátorov je veľké geometrické kovanie, ktoré je potrebné pri prenosoch výkonu ich rozsahu regulácie prevodového pomeru zamieňať.
Pri drôtovom kolese je polomer priradený nasledujúcemu vzorcu:
Počas návrhu rozrahunka akceptujte:
Koeficient zásob zcheplennya;
Minimálny pracovný polomer disku.
Pracovné plochy oceľových trecích kolies sú leštené s krátkosťou Ra 0,63...0,32 mikrónov.
Aby sa zabránilo epidemiologickému falšovaniu, stredná časť disku nebola sledovaná.
Razrahunok na kontaktnom napätí by sa malo vykonávať na minimálnom priemere disku, keď je potrebná najväčšia lisovacia sila a kovanie dosiahne najväčšiu hodnotu.
Obrázok 1.3 - Tlačné nástavce: a) skrutka; b) kulkové
2 Týždenné údaje
Je potrebné otvoriť predný trecí prevod pre pohon pásového dopravníka, aby drôtené koleso prenášalo ťah P = 2 kW pri najvyššej rýchlosti ω1 = 90 rad/s na hnané koleso, ktoré sa ovíja maximálna rýchlosť ω2max = 45 rad/s.
Ako uchopovací nástavec volíme nástavec skrutkovaný, ktorý zabezpečí stálu silu úchopu.
Materiál kolesa je určený: menší je PTK textolit a väčší je oceľ 45.
Akceptujeme rozsah regulácie prevodového pomeru
Prenos je spôsobený vzorcom:
Krútiaci moment Mn, ktorý je prenášaný hnacím kolesom
Na prenesenie danej tesnosti, vyjadrenej obvodovou silou, je potrebné zabezpečiť mind de force trením medzi mačkami.
de β je koeficient zásoby reťazí, β=1,3.
Okamih straty je vyjadrený nasledujúcim vzorcom:
3 Dizajnové prevedenie trecieho variátora
dotykovým napätím
Priemer d1 menšieho kolesa je významný z hľadiska kontaktného materiálu. Zoberie sa koeficient zásoby zchelennya, β = 1,3; koeficient straty najdlhšej trolejovej čiary f=0,3; prípustný prítlačný tlak (textolit na oceli) [σ]k = 70 N/mm2, modul pružnosti pre menšie koliesko (textolit) E1=6x103 MPa, pre väčšie koliesko (oceľ) E2 = 2,15x105 MPa.
Riadiaci modul pružnosti E pre nasledujúci vzorec:
Rozsah nastavenia:
Pri návrhu rozrahunka prijať
Štrukturálne maximálny priemer disku:
Geometrické kovanie s hnacím kolesom:
Іnshі razmіri kolіs priymayut konštruktívne.
4 Vývoj dynamického modelu
4.1 Bloková schéma objektu
Tento systém pozostáva z elektromotora, ktorý vytvára moment Mn motora, spojky, hnacieho kolesa, hnaného kotúča, ložísk a pracovného telesa. Motor vytvára moment otáčania pomocou otočného kĺbu ω, ktorý sa prenáša cez spojku na drôtenom kolese z nového vodiaceho kotúča potom na pracovné teleso (obr. 3.1). Skrutkovací nástavec zabezpečuje prenos momentu otáčania.
Obrázok 4.1 - Rozrahunova schéma pohonu.
4.2 Analýza povolených kvót za hodinu vytvorenia modelu
Na zostavenie modelu si vezmeme elektromotor, ktorý zabezpečuje konštantný moment, ktorým sa otáčať, objímky z η = 0,98, ložiskové guľôčkové ložiská z η = 0,99 a valivé ložiská z η = 0,97. Deformácie kolesa a disku nie sú poškodené.
Obrázok 4.2 - Model prednej prevodovky
4.3 Dynamický model
Model môže mať 4 stupne voľnosti a ruh tіl, ktorý je súčasťou modelu, je popísaný systémom diferenciálnych úrovní, na základe výsledkov, ktoré sú prevzaté z dynamických parametrov pohonu. Systém diferenciálnych rovnosti možno vidieť:
de Is, Ip - indukčné momenty zotrvačnosti častí motora a pracovného telesa, ktoré sú zabalené;
I1, I2 – navodenie momentu zotrvačnosti kolesa a disku správnym spôsobom;
φs, φp, φi sú vrcholové súradnice hmôt, ktoré sa obopínajú;
Мn - moment hnacích síl (dvigun);
Mo - moment síl podpory (pracovného tela);
c1, c2 - tvrdosť hriadeľov;
k1, k2 – koeficient tlmenia;
ε - geometrické kovanie.
Tri diferenciálne čiary, ktoré popisujú správanie sa pohonu v robotickom procese, boli zložené z dynamického modelu. Dali vykonuєmo doslіdzhennya skladaný model. Model je navrhnutý s jednostupňovým vstrekovaním, ktoré sa vstrekuje na hriadeľ motora.
4.4 Označenie zotrvačnej charakteristiky rukhlivy
časti a tvrdosť hnacích prvkov
Okamihy zotrvačnosti nôh, ktoré sa obtočia, znamenajú ružencovú cestu. Vodiaci moment zotrvačnosti častí motora, ktoré sú obalené:
Vodiaci moment zotrvačnosti častí pracovného tela, ktoré sú obalené:
Vodiaci moment zotrvačnosti kolesa:
Vodiaci moment zotrvačnosti disku:
Razrahuemo tvrdosť hriadeľov:
de - modul pruženia 2. druhu (zsuvu),
Tvrdosť drážkovaného hriadeľa:
Tvrdosť gwent:
4.5 Implementácia dynamického modelu v Simulinku
Na základe systému diferenciálnych rovníc (č. 4.3) pre doplnkový interaktívny systém Simulink na modelovanie nelineárnych dynamických systémov zostavíme schému dynamického modelu pre pohon s trecím variátorom (obr. 4.3). Význam zmien, rovnako ako v schéme dynamického modelu, je uvedený v tabuľke 4.1.
Tabuľka 4.1 - Označenia premenných, ktoré sú víťazné
v dynamickom modeli
| Popis | Vymenovanie | Schéma | Od. |
| Vodiaci moment zotrvačnosti častí motora, ktoré sa ovíjajú | Je | ||
| Vodiaci moment zotrvačnosti detailov pracovného tela, ktoré sú zabalené. | IP | ||
| Vodiaci moment zotrvačnosti kolesa | I1 | ||
| Vodiaci moment zotrvačnosti disku | I2 | ||
| Súradnice odrezania baliacich masiek | - | rádium | |
| Moment hnacích síl (dvigun) | Mn | N*m | |
| Podpora momentu síl (pracovný orgán); | Mo | N*m | |
| Tvrdosť drážkovaného hriadeľa | s 1 | N/m | |
| Tvrdosť gwent | c2 | N/m | |
| faktor tlmenia | k1 | - | |
| faktor tlmenia | k2 | - | |
| Koeficient zásob | β | b | - |
| geometrické kovanie | ε | e | - |
Obrázok 4.3 - Implementácia dynamického modelu v Simulinku
Výstupné údaje:
5 Analýza dynamických procesov v objekte
5.1 Analýza dynamických procesov v oblasti hodín
Z analýzy grafov je zrejmé, že prostredníctvom zotrvačnej sily objektov,
prostredníctvom pružín sily, geometrického kovania a sily tertya sa zlepšuje rozdelenie systému. Posun disku počas prvej sekundy momentového programu, hriadeľ motora je prakticky rovný nule (obr. 5.1-5.4).
Toto je inšpirované silou pružiny hriadeľa a skrutky a zotrvačnou silou kolesa a disku, v momente štartu sa obal navinie, potom keď sa moment nastaví na otáčanie, obal disku sa posunie pri moment.
Obrázok 5.1 - Hĺbka rezu na rotáciu hriadeľa motora (rad) za hodinu (s)
Obrázok 5.2 - Pád kuty na otočenie kolesa (rad) za hodinu (s)
Obrázok 5.3 - Závislosť Kuta od rotácie disku (rad) za hodinu (s)
Obrázok 5.4 - Nezávislosť kuty od rotácie pracovného tela (rad) za hodinu (s)
5.2 Údaje dynamického modelu
na rozlohe táborov
Dynamický model popísaný diferenciálnymi rovnicami môže byť reprezentovaný buď vo forme maticových rovníc (matice A, C, D) alebo prezentovaný vo forme prenosovej funkcie. Keďže model môže mať 4 stupne voľnosti, je potrebná Laplaceova transformácia, aby sa plynulo eliminovala prenosová funkcia diela. K tomu si môžeme predstaviť model vo forme matíc, vikoristovuchi їх rozrahunka іinteraktívny systém MATLAB.
Diferenciálne zarovnanie dynamického modelu:
Poďme prerobiť systém.
Predstavte si model v maticovej forme:
Uveďme si nasledujúcu definíciu:
Dynamický model vyzerá takto:
Znásobme poškodené časti vzťahu s návratovou maticou:
Návratová matica pre pomoc MATLABu:
L=;
F = [-k1 k1 0 0; 0-k1k10; 0 k2-k2 0; 00 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Vynásobte inverznú maticu maticou:
R = [-c1c100; c1-c100; 00-c2c2; 00 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Vynásobte inverznú maticu maticou:
K=;
Matice A, B, Z, D môžu vyzerať takto:
Uveďme si odčítanie matice v M-súbore MATLAB a odčítanie prenosovej funkcie dynamického modelu, aby sme opísali odozvu modelu na streak-like vstrekovanie (obr. 5.5, 5.6).
A=;
B=;
Funkcia prenosu môže vyzerať takto:
W(s) = (-2,132e-014 s^7 + 16,39 s^6 + 6,586 s^5 + 3,275e004 s^4 - 2343 s^3- 6,166e006s^2 - 7,573e004 s + 1,407 s 1,101 s^7 + 5156 s^6 + 3080 s^5 + 6,401e006 s^4 + 6,915e005 s^3 - 1,742e008 s^2 - 2,015e007 s + 2,25e-007).
Obrázok 5.5 - Prechodný proces v dynamickom modeli
Obrázok 5.6 - Charakteristika amplitúda-fáza-frekvencia a fáza-frekvencia
Z analýzy grafov je vidieť, že kogenerácia modelu rastie a nezastaví sa. Preto je potrebné navrhnúť regulátor (korekčnú lanku) (obr. 5.7), aby dynamický model bol malý, doznievajúci počas prechodového procesu, malá hodina pokoja (1-5 sekúnd) s prekmitom už nie. ako 10-15%.
Obrázok 5.7 - Dynamický model s modálnym regulátorom
5.4 Návrh modálneho regulátora
Myšlienka vytvorenia modálneho regulátora je založená na skutočnosti, že tento koeficient je potrebné zvoliť tak, aby pól uzavretej slučky regulácie bol v zatienenej oblasti proti sebe. Je potrebné zabezpečiť doznievajúcu coli počas prechodného procesu a krátku hodinu kľudu s prekmitom nie väčším ako 10-15% (obr. 5.7).
Obrázok 5.8 - Oblasť drážkovania pólov oceľových systémov
Na povzbudenie modálneho regulátora je potrebné znovu overiť keratinizáciu modelu.
Opätovné overenie keratinizácie sa vykonáva podľa dodatočného kritéria Kalmana:
Ak sa hodnosť štvorcovej matice Ss(n,n)= rovná rádu matice n, potom model, ktorý je popísaný maticami A,, C, D, je Kerovovský. Poradie matice dynamického modelu je pokročilejšie 8.
Hodnosť matice je maximálna veľkosť štvorcovej matice, ktorej znamienko sa nerovná nule.
Hodnosť matice môže byť priradená ďalšej funkcii hodnosť v MATLABE:
Poradie matice A dynamického modelu je na poradí, aj Kerovanov model.
Metóda výberu priraďuje póly novej prenosovej funkcii uzavretého okruhu. Pomocou MATLABu môžete poznať koeficient modálneho regulátora a prevziať prechodový proces z dynamického modelu s regulátorom (obr. 5.9).
p=[-7-0,2i -7+0,2i -5-0,5i -5+0,5i -5-6-17-10];
sysE=ss(A-B*k,B,C,D);
Koeficient modálneho regulátora:
k=[-237,0116 237,0565 173,5746 -185,8740 8,6474 -8,5860 16,0462 14,2642].
Z analýzy grafu 5.7 je vidieť, že prechodový proces systému sa skončí za 2,5 sekundy bez prestrelenia.
Obrázok 5.9 - Prechodný proces pre dynamický model s regulátorom
Višňovok
Ktoré roboty vyvinuli dynamické procesy, ktoré majú pohony s trecím variátorom. Vybrali sa výstupné dáta, nastavil sa konštrukčný návrh trecieho variátora, určili sa zotrvačné charakteristiky pohyblivých častí a tvrdosť hnacích prvkov.
Bula zostavil blokovú schému skúmaného objektu, matematický popis dynamického modelu, ktorý umožňuje systému zmeniť správanie systému v prípade jediného útoku naň.
Uskutočnila sa aj analýza dynamických procesov v objektoch strážnej oblasti a v priestoroch táborov. Návrh modálneho regulátora, ktorý zabezpečí dokončenie prechodového procesu dynamického modelu za 2,5 sekundy.
Literatúra
1. Guzenkov P.G. Podrobnosti o stroji: Navch. pre univerzity. - M.: Višč. škola, 1986. - 359 s.
2. Bakaev N.A., Voloshina O.M. Základy konštrukcie trecích ozubených kolies. - Prezentácia Rostovskej univerzity, 1985. - 176 s.
3. Pronin B.A., Revkov G.A. Bezstupіnchastі klinopasovі a friktsіynі prenosy. - M.: Mashinobuduvannya, 1980. - 320 s.
4. Komárov M.S. Dynamika mechanizmov a strojov. Strojárstvo, M., 1969.
5. Ivanov E.A. Spojky Mashgiz, M, 1959.
Trieda 56a, 55 g č. 145832
Predplatená skupina M 284
V. A. Piščikov
TRECÍ POHON ŠIJACIEHO STROJA
Nárokované 28. marca 1961. za M 724039/28 ×" 12 na Výbore pre právo vinárov a vodkriptiv pri Radiačných ministroch SRSR
Podporuje sa trecí pohon šijacieho stroja, ktorý je jednoduchší svojou konštrukciou a kompaktným a využívaným negatívnym vstrekovaním síl zotrvačnosti zotrvačníka pri rozbehu tejto vibrácie šijacieho stroja.
Je konštruktívne vyprážanie friccine hranie PoleAє, v poradí, Scho Vіn otočí vedenie SKIV, Zemontovaniya pre dokončenie Cullete pіdshipnikіv na tele stroja s káblovým valčekom rollerine, Zovnіshnє Kiltsi є Providenoy Elemang oholiť, aby sa cez valčeky. obalenie vnútorného krúžku ložiska, pripevneného k hriadeľu hlavy stroja.
Kulkov_ ložiská (jeden lp obdva) sú namontované na tele stroja pre prídavné závitové puzdro, priviazané k pedálu noža stroja.
Na kresle je schematicky znázornená pronácia trecieho pohonu.
Remenica 1 (zotrvačník) je pevne zosilnená na vonkajšom krúžku 2 kužeľových štandardných valčekových ložísk s kosouhlým stykom, vnútorný krúžok 8. ložiska je pevne pripevnený na hriadeli hlavy 4 šijacieho stroja. Separátor b, špeciálne vyrobený namiesto štandardného, spojený s telom stroja alebo časťou, pevne spojený s telom, napríklad závitovým ložiskovým puzdrom , ktoré prenáša os susilla; inak je ložiskový krúžok 9 upevnený pomocou kladky 1.
Týmto spôsobom bude trecí pohon pri zapnutom stroji bezpečný, otáčky budú do maximálnej rýchlosti a na druhej strane, keď sa zapne hodina vibrácií stroja, bude najmenej rovnaká na vibrácie stroja od zastavenia pohonov.
S výhradou výroby vína
1. Friczіniy Vіdd Schweinja Machini, Vidomij Tim, Shah, scho, Metódy kontextu kontextu, Vіn sa v sebe mení na strelca Shkіv, Zemontovaniy pre dodatočný Culite pіdshipnikіv na Corps of the machine z Mozhlivіs os osi Povinnosti Kilkoloviy P_DSHIPNIK, Zovnіshnє Kiltsy vodivý prvok, ktorý je poháňaný valčekmi a upevnený na telese stroja, oddeľovač na obalenie v strede ložiskového krúžku, pripevnený k hlavnému hriadeľu stroj.
2. Pohon pre odsek 1, v prípade l a h a y shy tim, pre OS „v pohybe kladky sú guľkové ložiská jedno alebo druhé - namontované na skrini vozidla pre prídavné závitové puzdro, priviazaný k nožnému pedálu
Poriadkový A. V. Nechaikin
Techred T. II. 1 urilko Korektor V. M. Andrianová
Redaktor V, St Haaova
Do .., do psch. 1,111-62 r. Boom formát. 70; 108/,. Objem 0,18 zobrazenia. l.
Zach. 2709 Náklad 500 Cena 4 kop.
TsBT1ch Do výboru vpravo a vpravo od výboru
Moskva, Stred, M. Cherkasky prov., D. 2/b.
Drukarnі TsBT11, Moskva, Petrivka, 14
Trecie pohony so širokým rozsahom regulácie sledujú diferenciálny obvod.
Pre experimentálne inštalácie sú trecie pohony predimenzované.
Plynulý trecí pohon Svіtlozarov.
Rozrahunok trecie základy pohonu na riešenie, otrimanuyu schee Euler pre závit gnuchkoi giuchkoi. Keď urazili ženu, jednu a tú istú, jednu a tú istú, pozreli sa na seba naraz v bloku so zväzkom nití, ktoré môžu byť pružné.
Účinnosť trecieho pohonu je určená trakčným koeficientom.
Pri trecích pohonoch sa ťažná sila prenáša na pružný orgán (steh, lano, kopija) silovým trením hnacieho prvku. Trecí pohon zastosovuyut pre linky a laná, to je dôležitejšie - pre kopijníkov.
| Zmeňte grafiku. |
Pri trecom pohone na klase je napnutie okrem už určeného označenia, ako aj rad hlavy, potrebné na vytvorenie dostatočnej sily spojenia ťažného prvku s vencom pohonnej jednotky. V tomto prípade je hodnota yogo určená hodnotou ťažnej sily a parametrami pohonu.
Normálny chod trecích pohonov zabezpečujú vinutia inštalovaných napínacích nástavcov (odd. Ch. Na krátkych stacionárnych (do 60 m), navíjacích, výsuvných a prenosných dopravníkoch sú inštalované mechanické napínacie nástavce.
Mlins s trecím pohonom (Sh-25, Sh-70) majú dva hnacie valčeky a dva podporné valčeky s plastovým olejom.