Një makinë elektrike qepëse, qoftë ajo një makinë industriale, mund të ketë jo vetëm një dizajn të ndryshëm për rregullimin e shpejtësisë (fërkimit), por një qark tjetër elektrik, parimin e funksionimit të një motori elektrik.
Disa modele të disqeve elektrike mund të kenë konsum të ulët të energjisë nga 40 në 110 W, mbështjellje me shpejtësi të ulët dhe lloj asinkron të motorit robotik. Me fjalë të tjera, motori elektrik pobutovy nuk tregon risitë e mëdha dhe të parëndësishme dhe "riparimet" periodike vimagaє. Motori i qepjes së makinës industriale mund të funksionojë pa ndërprerje, pa mbinxehje dhe pa harxhuar nxehtësi.
Nëse keni nevojë për një makinë për qepje me shumicë, atëherë mendoni vetëm për një makinë të mirë. Pas goloshennyami mund të blini tavolina të përdorura me çmim të ulët nga motorët e lëshimit Radyansky. Tse nadіynі dhe pratsezdatnі elektroprivodі dhe është e mundur që ju të fitoni sa vijon. Ale vrahuyte, të gjithë erë e keqe të punës punojnë edhe më fort, dhe asnjë rregullim i zhurmës nuk do të humbasë. Prandaj, ju rekomandojmë që ta sillni në kohën e duhur, për shembull, çelikun dhe plumbin, të cilat përfshihen në komplet në makinën qepëse tipike. Unë vetë një makinë elektrike e tillë qepëse thuhet se shqyrtohet në këtë artikull.

Mund të blini një makinë elektrike qepëse nga kompania tipike dhe ta instaloni në çdo lloj stili industrial, por është më mirë të lani jogën në një grup me një tavolinë, më shpesh vetë stili është më i lirë për një dvigun.
Nga rruga, një çelik i dobishëm për qepje mund të blihet për një makinë qepëse me porosi. Zruchny shtrirje prej çeliku, dhe në të njëjtën kohë, rozkrіyny qepje çeliku për të bërë punën tuaj të rehatshme, të cilat obov'yazkovo nënkuptojnë në humor dhe është e zbatueshme për nivelin e punës. Edhe nëse keni mundësi të qepni shumë, mos u mashtroni nga "dribnitsy" të tilla.

Lundroni një detaj kaq të parëndësishëm si një vimikach në makinën elektrike, krijon rehati tek roboti dhe ngjall humor.
Tensioni i motorit elektrik dhe tensioni i
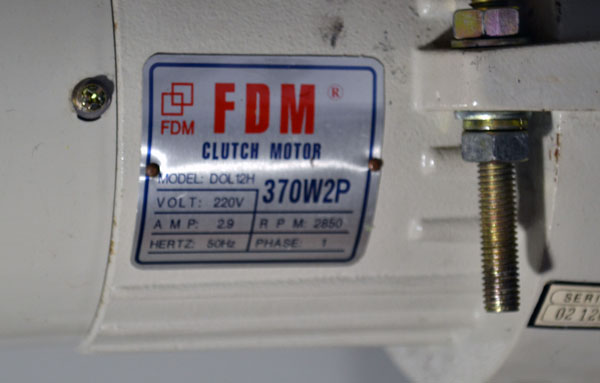
Në anën e përparme të motorit ka një etiketë që tregon tensionin e matësit dhe ngushtësinë e motorit.
Nëse vendosni të instaloni një makinë në shtëpi ose në një studio të vogël, nëse nuk ka prizë 380 volt, zgjidhni një motor elektrik për një robot me 220 volt.
Dhe ngushtësia e motorit këtë prapanicë nuk mund të ketë një rëndësi të veçantë, oskolki shvidk_st i robotëve dhe makinave qëndron në faktorë të tjerë. Le të flasim për ta më poshtë.
Çfarë është një makinë fërkimi? Nëse jeni duke drejtuar një makinë, atëherë ju jeni përgjegjës për të ditur se një lidhje e tillë. Pra, boshti i fërkimit të makinës elektrike të qepjes është i ngjashëm.
Motori mbështillet gradualisht me shumë swidkistyu. Kur shtypni në pedale, disku i bashkëngjitjes së fërkimit (Ferado) me jastëkë tekstoliti ngjitet në volantin e motorit dhe ndërvepron me të. Sa më shumë të shtypni diskun e fërkimit në volantin e motorit elektrik, aq më i mirë është bashkimi dhe aq më e madhe është shpejtësia. Për këtë, ndonjëherë në punë të thatë, aroma e tekstolitit të kënduar shfaqet në kutinë e rregullt.
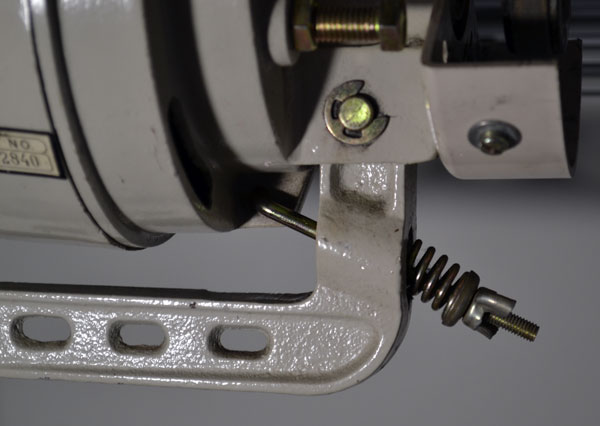
Hapat e rrotave të lira (pa susilla) të pedalit drejt makinës rregullohen nga një vidë.
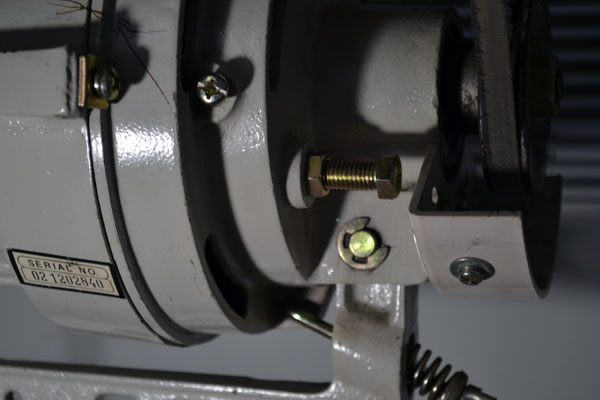
Dhe boshti është me vida binjake, më saktë, dy vida (z anën e dobishme edhe një) galma është e rregulluar. Pra, vetë galma mayzhe është si një makinë.
Nëse punoni me suedizim të lartë, atëherë pas dhëmbëve të një makine qepëse, për inerci, do të vazhdoni të mbështillni. Kjo ka nevojë për një galmo, sikur të duket si një mbështjellje tashmë e papërshtatshme. Boshti i cim-it është një vidë me një arrë kyçëse dhe hapi i mprehtësisë së gamës është i rregulluar.
Ne nuk postuam një foto të tufës së fërkimit të motorit, riparimi i motorit është përgjegjësi e elektricistit, por është e nevojshme të rregulloni robotin me duart tuaja.
Është më mirë të rregulloni këtu lartësinë e pіdёm chi kut nakhil të pedalit.
Vіd chto vë swedkіst e makinës qepëse industriale robotike

Shpejtësia e robotit dhe e makinës industriale të qepjes duhet të depozitohet me ne përballë numrit të mbështjellësve të motorit elektrik. Ky parametër mund të gjendet në shkëmbyesin ose në pasaportën e diskut. Por detaje të tilla kanë më pak gjasa të gërvishten nga specialistët e qepjes së fabrikës. Për makinat e tjera, ky parametër i motorit robotik është i ndryshëm, ndërrimet e marsheve janë një mënyrë tjetër për të rregulluar shpejtësinë e makinës robotike të qepjes.

Dhe për ndihmë, ndërroni rrotullën e motorit. Sa më i madh të jetë diametri i rrotullës, aq më e kufizuar është shpejtësia e makinës qepëse robotike.
Nuk është e lehtë të ndryshosh rrotullat, për të cilat duhet një çelës për 19 dhe vetë rrotullën, e cila tingull i jepet motorit. Ale, kontrolloni nëse ju ndodh të rregulloni gjatësinë e rripit të lëvizjes dhe nëse keni shumë luhatje, mund të keni një diametër më të vogël.

Çfarë solli një shqiptim i mirë, kaq modern, mund të jetë pa zhurmë dhe i bukur si një kompani tipike, por nuk ju nevojitet. Tse vіdnositsya të shvachok-detyrat e shtëpisë. Erërat e këqija praktikohen shpesh në shtëpi në makinat qepëse industriale, të tilla si klasa 1022, klasa 97. Për tre arsye të ndryshme, por në radhë të parë, zhurma e robotit dhe era e keqe nuk mund t'i mposhtin.
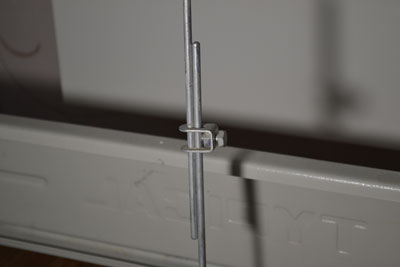
Për ta zgjidhur këtë problem me lehtësi dhe me kosto të ulët, blini një makinë elektrike TUR-2 dhe instaloni direkt në trupin e makinës industriale. Nuk është e mundur të shpjegohet se si ta instaloni atë, nga këndvështrimi i lëkurës është e mundur të mposhtni vendimin tuaj. Dhe ne gjithashtu mund të bëjmë, nëse është e nevojshme, të zëvendësojmë spinën dhe të bashkojmë shufrat, siç tregohet në foto.
Përveç kësaj, nëse një motor i tillë duhet të bashkojë pozicionin e mbështjelljes me mjegull, motori do të mbështillet në një ditë tjetër. Ju do të jeni të lumtur kur të lidheni me një makinë të tillë overlock.
Por të gjitha këto arsye njihen vetëm për një elektricist, nuk rekomandohet që tifozët e Ukrainës të zgjedhin në mënyrë të pavarur një motor, dhe, për këtë çështje, nuk duhet të ndryshoni, bashkoni atje. Unë jo vetëm që jam drejtpërdrejt i pasigurt nga një sulm strum, por jam i tëri. Vaughn manifestohet në një orë të parëndësishme. Në rast të mbinxehjes së mbështjelljeve të motorit, mbështilleni atë në stacionin jo-pune të makinës qepëse, por mund të lidhet në skajin e mbështjelljes.
Markat e tjera të motorëve elektrikë mund të instalohen gjithashtu në makinat industriale, por ne rekomandojmë vetëm ato që janë shqyrtuar nga ne, dhe vetë makinën elektrike TUR-2.
Dhe mos harroni se shpejtësia e makinës së shkrimit robotik është ulur ndjeshëm dhe qepja në të mund të jetë jetëshkurtër, pushimet e mëdha (pauzat).
Ndonjëherë ju duhet të gjeni një makinë qepëse, më saktë, të hiqni kutinë plastike të makinës në mënyrë që të keni akses në nyje të tjera. Një nevojë e tillë për të fajësuar është edhe më e rrallë dhe fajësojeni vetëm nëse është e nevojshme të zëvendësoni motorin elektrik të makinës qepëse dhe rripin e lëvizjes. Vtіm, për të zëvendësuar makinën elektrike, ndonjëherë hiqni kapakun e poshtëm. Dhe boshti duhet të jetë "i bllokuar", do t'ju duhet ta merrni përsëri makinën.
Në këtë artikull, ju e dini se si të dini shkakun e dështimit të makinës elektrike, si dhe si të zëvendësoni në mënyrë të pavarur motorin elektrik.
Tingulli Problemet e makinës elektrike të qepjes shkaktohen nga pedalet, jo nga motori elektrik. Nuk rekomandohet të merrni në mënyrë të pavarur pedalin. Kujdesuni për pedalin, mos i përdredhni shigjetat, mos "qëndroni" mbi to me një stil të ulët dhe mbani parasysh që një avion elektrik me tension 220 volt duhet të kalojë nëpër këto shigjeta.

Makinë qepëse me dorë - ngjitja dhe riparimi i makinës
Makina qepëse është thjesht e domosdoshme kur qepni pëlhura të tjera dhe navit shkir. Dhe boshti i drejtimit manual të dyshemesë nuk është i dobishëm, kështu që nuk ka bazhanya për të rrahur. Sidoqoftë, kjo situatë është e lehtë për t'u korrigjuar, nëse blini një makinë elektrike qepëse menjëherë nga pedali dhe rripi i makinës në komplet. Motori elektrik prej lëkure mund të montohet rregullisht, gjë që ju lejon ta instaloni në një makinë qepëse manuale.
Pjesa e poshtme e makinës qepëse është tani një ekspozitë muzeale. Make up, trokisni, ajo këmbë është lagur. Para kësaj, makina shpesh fillon të rrotullohet në drejtimin e gabuar. Si të veprojë si një yogo vikoristannya, si një pulëbardhë makinë apo Podilska ju si një vlashtovu e tërë? Thjesht duhet të instaloni makinën elektrike të qepjes. Mbërthyes për lëkurë të re pulëbardhë. Vetë makina elektrike është më pak e shtrenjtë se një rrip i ri për makinën me këmbë.
Prefiksi zigzag për një makinë qepëse është një shtojcë e zgjuar që imiton një rresht zigzag me një makinë të thjeshtë me rresht të drejtë të llojit Podolsk.
Në këtë artikull, ju e dini pse makina po rrotullohet me një shirit horizontal dhe si ta rregulloni defektin në rreshtin e qepjes me duart tuaja.
Makina qepëse nuk është e qepur, pasi rondeli i fërkimit të volantit është instaluar gabimisht, ose tufat dhe tufat janë ndryshkur pas një ore pune të vështirë.
Modeli prej lëkure i makinës qepëse ka një grup të ndryshëm këmbësh. Raporto pershkrimin putrat vykoristannya për makina qepëse firma Janome.
Për të punuar me lëkurë natyrale, do t'ju nevojiten mjete speciale, bashkëngjitje për instalimin e aksesorëve, ngjitësve dhe materialeve të tjera të aplikuara.
Wimogi për të drejtuar makina qepëse.
Tema: Makinë elektrike për makina qepëse.
leksioni 7.
Në makinat qepëse, puna kryhet në mendje jashtëzakonisht të rëndësishme, nëse është shtrirja e vitit
kryeni deri në 1000 nisje të makinës. A mund të gjeni një makinë tjetër teknologjike me një mënyrë të ngjashme funksionimi? Dhe shpejtësia e boshtit të kokës është deri në 9000 hv -1! Shumë ingranazhe nuk nxjerrin në pah shaka të tilla! Yje dhe ndihmë speciale për makinën elektrike:
1. Shpejtësia - siguria e ndërtimit në boshtin e kokës së makinës (5 - 6) 10 3 xv -1.
2. Fajtor vitrimati deri ne 1000 vimkneni per nje vit.
3. Fillimi i qetë, rregullimi më i qetë i shpejtësisë së makinës.
4. Kontrolli i makinës - pedal me forcën kufizuese të presionit mbi të - 60 N në këmbë dhe ulur deri në 150 N.
5. Mati lartë K, P, D, (në punishte tymoset tepër në mungesë të qepjes së qepur fort), qepur me dorë (mos e shqetëso operatorin të ulet lirshëm), i sigurt për robotin, të dyja në elektrike. dhe në veshje mekanike.
6. Vartist e / drive mund të jetë objekt i diskutimit të veçantë. (Në disqet elektrike, të cilat janë të automatizuara, ka mbi 30 mikroqarqe, dhe kjo variancë është e barabartë me atë të kokës së makinës!)
Në industrinë e qepjes, ekzistojnë kryesisht tre lloje të disqeve elektrike, në varësi të llojit të makinës teknologjike:
· Kontaktorët- nëse duke rrotulluar vimikacha ose duke shtypur pedalin, makina merr menjëherë shpejtësinë e pasaportës. Nuk është e nevojshme për butësinë e fillimit dhe rregullimin e shpejtësisë. Të shtyrë të ngecë në makineri të qeta dhe të thjeshta që rrallë dridhen (mbështjellja e rrobave, dublimi, etj.)
· Fërkimi- nëse midis motorit elektrik asinkron dhe transmetimit të rripit V, është instaluar një tufë fërkimi, e cila funksionon në pedale, e cila siguron një fillim të qetë dhe rregullim të qetë të shpejtësisë në lëvizjen e makinës. Sot mund të jetë më e gjerë, si në makinat universale ashtu edhe në ato speciale.
· automatizimi makinë elektrike. Ju lejon të programoni robotin e makinës, të kryeni automatikisht operacionet kryesore dhe shtesë të ciklit teknologjik. I shtrenjtë dhe i palosshëm, me efikasitet të ulët. Dhe tendenca është zëvendësimi i jogës, le të falim rregullimin e mirë të motorit me ritëm të shpejtë.
Në 5 të vogël, jepet një diagram bllok i tufës së fërkimit të makinës elektrike të fërkimit të makinës qepëse, për të cilën përcaktimi:
1. Boshti i motorit elektrik asinkron,
2. Disk përçues, i fiksuar mirë në fund të boshtit, pa veshje unazore, çeliku,
Disk referencë, me jastëkë unaza në të dy anët, i bërë nga materiali rezistent ndaj konsumit me fërkim të lartë.
Mbërthimi i diskut në boshtin 6 tufë fërkimi.
3. Disku është i galvanizuar, jo i fortë, shpesh lundrues, në mënyrë që sipërfaqja e tij të rivendoset vetë në sipërfaqen e diskut 3 kur mbyllet me të.
4. Kompresimi i sustave, shtytja e boshtit 6 menjëherë nga disku 3, thyejeni në të djathtë derisa të mbyllet me diskun 4.
5. Bosht myftinie; përshtatje e përafërt me kushinetën e majtë të topit të tufës 7 dhe përshtatjen e djathtë.
6. Rukhoma mëngë e brendshme horizontale. Ruhaetsya në trupin e myftiut në të djathtën e majtë menjëherë nga boshti 6.
7. Rrip V-rrip, përçues. Në makinat e vjetra industriale, u instaluan dy rrotulla - një më e vogël (poz. 9 nuk tregohet) - për funksionimin në një makinë të re ose të vjetër për riparim; arriti një ulje të shpejtësisë së makinës me 25%.
10. Rul në brazdë të tufës së lirshme.
11. Rëndësia me dy shpatulla.
12. Dozhini i rregulluar me shtytje.
13. Filloni pedalin.
14. Këllëf myftinie, e cila është e palosur në dy pjesë (nuk tregohet në diagramin e mëposhtëm).
15 . Makinat Promsteel.
16. Një pjatë, derisa trupi i muffit në montim të varet nga poshtë. Në sharnirі - gvint e fundit; shërbejnë për fiksimin e trupit të bashkimit në pozicionin e kërkuar për ngushtësinë e duhur të transmisionit të rripit V.
Universiteti Teknik Kombëtar i Donetsk
Kualifikimi i Punës
Në temë:
Zhvillimi i një modeli dinamik për një makinë me një variator fërkimi
Vikonav:
Studenti gr. MS-03n: Kasatka P.O.
Kerivnik: Derkach O.V.
Konsulent: Gorobets I.O.
DONETSK 2007
ESE
Puna bachelor: 38 faqe, 15 libra të vegjël, 1 suplement, 1 tabelë, 5 dzherel.
Në këtë robot bachelor, është e nevojshme të zhvillohet një model dinamik për makinën, në mënyrë që të hakmerret ndaj variatorit të fërkimit; shtoni ekuacionet diferenciale që përshkruajnë proceset dinamike të njësisë.
Objekti vijues: i drejtuar nga një variator fërkimi.
Puna meta: është e nevojshme të zhvillohet një model dinamik për diskun për të zëvendësuar variatorin e fërkimit, me ndihmën e paketës softuerike MatLab Simulink, për të siguruar parametrat e nevojshëm të procesit kalimtar.
variatori i fërkimit, procesi kalimtar, shtrirja diferenciale, modeli dinamik, bashkimi gjeometrik, momenti i inercisë
Hyrja
1 Zagalni vіdomostі rreth variatorëve të fërkimit
2 Të dhëna javore
3 Projektimi i variatorit të fërkimit pas tensionit të kontaktit
4 Zhvillimi i një modeli dinamik
4.1 Diagrami strukturor i objektit dhe procesit në të ri
4.2 Analiza e lejimeve dhe faktorëve që merren parasysh në modelin e përputhjes
4.3 Modeli dinamik
4.4 Përcaktimi i karakteristikave të inercisë së pjesëve lëvizëse dhe fortësisë së elementeve të makinës
4.5 Zbatimi i një modeli dinamik në Simulink
5 Analiza e proceseve dinamike në objekt
5.1 Analiza e proceseve dinamike në zonën e orës
5.2 Paraqitja e një modeli dinamik pranë hapësirës së stacioneve
5.3 Dizajni modal i kontrolluesit
Visnovok
Perelik posilan
shtojcë
Hyrja
Shumica e makinave dhe instalimeve moderne krijohen sipas skemës: dvigun - transmetim - organ pune (vykonavchiy mekhanizm). Nevoja për transferimin e një lidhjeje të ndërmjetme midis motorit dhe trupave të punës së makinës lidhet me detyrat e rritjes së produktivitetit, tobto. zbіlshennya їhnёї shvidkodії.
Ora e ndërrimit të marsheve me fërkim hyn në orën kryesore të ciklit të punës së makinës, e cila gjithashtu shton produktivitetin e makinës menjëherë. Problemi i rritjes së produktivitetit lidhet drejtpërdrejt me zhvillimin e metodave për ndjekjen dinamike të makinerive dhe zgjedhjen e parametrave dhe strukturës optimale të tyre.
Për një model dinamik shtesë, bëhet një analizë e sistemit, pa pjesëmarrjen e një objekti real, dhe mbi këtë bazë, është e mundur të nxitet një sistem kontrolli për objektin, që postulon sjelljen e sistemit të kontrollit të atij objekti. Objekt.
1 Informacion i përgjithshëm rreth variatorëve të fërkimit
Fërkimi quhet transmetim, roboti bazohet në forcat fitimtare të fërkimit, për të cilat fajësohet kontakti i dy trupave të mbështjelljes nën forcën e forcës shtypëse Q.
Ingranazhet e fërkimit të dorës së mbështjelljes mund të ndahen në dy grupe kryesore: ingranazhet janë të parregulluara, d.m.th. me raporte ingranazhesh të shpejta mendërisht, ai rregullim i marsheve që ju lejon të ndryshoni pa probleme raportin e marsheve (rregullimi pa shkallë) (Fig. 1.1).
Një nga lëkundjet më të thjeshta dhe më të pasura është kompletimi i ingranazhit të fërkimit sipërfaqësor, i cili paloset në lëkundjen më të thjeshtë të dy rrotave (kotkiv), të fiksuar në boshtet lëvizëse. Për të transferuar lëvizjen pa falsifikim, është e nevojshme të shtohet një forcë Q në një rrotë, e cila është e mjaftueshme për fërkim në zonën e kontaktit, me të cilën fuqia e zinxhirit është më e fortë se madhësia e susilës rrethore që transmetohet.
Figura 1.1 - Variatori i fërkimit ballor
Përparësitë e ingranazheve të fërkimit janë: butësia dhe pa zhurmë e robotit, thjeshtësia e dizajnit, pamundësia e thyerjes gjatë ndryshim i mprehtëçift rrotullues në një nga boshtet e erës, aftësia për të lëpirë kotkіv, aftësia për të rregulluar vazhdimisht shpejtësinë në lëvizje, pa një ingranazh ingranazhi.
Nedolіkami є: nevoja për një lidhje të ngushtë, një kapje e madhe në bosht që mbështesin në hyjninë e forcës së bashkëngjitjes së ngushtë, e cila do të rrisë madhësinë e tyre dhe do ta bëjë transmetimin të rëndë, si dhe do të masë sasinë e ngushtësi që transmetohet; ngadalësia e transmetimit përmes lëpirjes së maceve; për shkak të amortizimit të lartë.
Variatorët e fërkimit ndalojnë si në transmetimet kinematike ashtu edhe në transmetimet e fuqisë në dridhje, nëse keni nevojë për rregullim të shpejtësisë pa shkallë (transmetimi i marsheve nuk e lejon një rregullim të tillë). Variatorët e fërkimit përdoren në makineritë e veglave, në makinat e pijeve alkoolike, makinat industriale dhe transportuese, disqet e pajisjeve vdekjeprurëse dhe makineritë e përpunimit të metaleve, robotët dhe manipuluesit, sistemet dixhitale të telave, mekanizmat për fuqinë e shtetit dhe lloje të tjera.
Vlera e variatorëve të fërkimit si rregullatorë pa shkallë dhe shpejtësia rritet në lidhje me një front të gjerë funksionon nga automatizimi i kontrollit të proceseve vibruese.
Njëri nga farkëtimet e variatorit të fërkimit është bërë nga çeliqet jakish (40, 50, ShKh15, etj.), dhe tjetri është bërë nga chavun gri, tekstoliti, fibra dhe plastika të tjera.
Tre lloje ingranazhesh pa fërkime me variatorë të fërkimit ballor me rrotullim të trupave të ngurtë janë më të thjeshtët për sa i përket dizajnit. Me një variator të tillë, është e mundur të lëvizni timonin përgjatë boshtit në vija të drejta, të treguara me shigjeta, me të cilat ingranazhet, ndërrimi ndryshon pa probleme në një ndryshim në diametrin e punës të diskut.
Falsifikimi gjeometrik i variatorit përcaktohet nga formula:
Shenja "+" - për timonin e makinës, shenja "-" - për diskun e makinës (Figura 1.2 i b),
de - rrezja e diskut, në falsifikimin maksimal;
b është gjerësia e diskut.
Figura 1.2 - Variator i fërkimit ballor:
a) nga një rrotë udhëzuese; b) nga disku
Mungesa kryesore e variatorëve ballorë është një falsifikim i madh gjeometrik, i cili në transmetimet e fuqisë së gamës së tyre të rregullimit të raportit të transmetimit duhet të ndërrohet.
Me një rrotë me tela, rrezja i caktohet formulës së mëposhtme:
Gjatë projektimit rozrahunka pranoni:
Koeficienti i stokut të zcheplennya;
Rrezja minimale e punës së diskut.
Sipërfaqet e punës të rrotave të fërkimit të çelikut janë të lëmuara me një shkurtësi Ra 0,63...0,32 mikron.
Për të fshehur falsifikimin epidemiologjik, pjesa qendrore e diskut nuk u gjurmua.
Razrahunok në tensionin e kontaktit duhet të kryhet në diametrin minimal të diskut, kur kërkohet forca më e madhe e presionit dhe falsifikimi arrin vlerën më të madhe.
Figura 1.3 - Shtytje me shtytje: a) vidë; b) kulkove
2 Të dhënat javore
Është e nevojshme të hapet transmisioni i fërkimit ballor për lëvizjen e transportuesit të brezit për mendjen, që rrota me tela të transmetojë tensionin P = 2 kW për shpejtësinë maksimale ω1 = 90 rad / s në rrotën e drejtuar, e cila mbështillet me shpejtësia maksimale ω2max = 45 rad / s.
Si një shtojcë kapëse, ne zgjedhim një bashkëngjitje të vidhosur, e cila do të sigurojë forcën e përhershme të kapjes.
Materiali i rrotave është caktuar: më i vogli është tekstoli PTK, dhe më i madhi është çeliku 45.
Ne pranojmë gamën e rregullimit të raportit të transfertave
Transmetimi është për shkak të formulës:
Momenti i rrotullimit Mn, i cili transmetohet nga rrota lëvizëse
Për të transferuar ngushtësinë e dhënë, të shprehur me forcë rrethore, është e nevojshme të sigurohet forca e mendjes duke fërkuar midis maceve.
de β është koeficienti i stokut të zinxhirëve, β=1.3.
Momenti i humbjes shënohet me formulën e mëposhtme:
3 Dizajni i projektimit të variatorit të fërkimit
nga tensioni i kontaktit
Diametri d1 i rrotës më të vogël është i rëndësishëm nga mendja e materialit kontaktues. Merret koeficienti i stokut të zchelennya, β = 1.3; koeficienti i humbjes së linjës më të gjatë të kontaktit f=0.3; Presioni i pranueshëm i kontaktit (tekstolit në çelik) [σ]k = 70 N/mm2, moduli i elasticitetit për rrotën më të vogël (tekstolit) E1=6x103 MPa, për rrotën më të madhe (çeliku) E2 = 2,15x105 MPa.
Drejtimi i modulit të elasticitetit E për formulën e mëposhtme:
Gama e rregullimit:
Në dizajn rozrahunka pranojnë
Strukturisht, diametri maksimal i diskut:
Falsifikim gjeometrik me një rrotë lëvizëse:
Іnshі razmіri kolіs priymayut në mënyrë konstruktive.
4 Zhvillimi i një modeli dinamik
4.1 Diagrami bllok i objektit
Ky sistem përbëhet nga një motor elektrik, i cili krijon momentin e motorit Mn, tufës, rrotës lëvizëse, diskut të drejtuar, kushinetave dhe trupit të punës. Motori krijon një moment për t'u kthyer, me një rrotullues ω, i cili transmetohet përmes një tufë në një rrotë me tela, nga një disk i ri udhëzues, më pas në një trup pune (Fig. 3.1). Një shtojcë me vidë siguron transmetimin e momentit të rrotullimit.
Figura 4.1 - Skema e Rozrahunit për ngasjen.
4.2 Analiza e shtesave që pranohen për orën e krijimit të modelit
Për të montuar modelin, marrim një motor elektrik, i cili siguron momentin konstant, i cili duhet të rrotullohet, mbyllet z η = 0,98, kushinetat e topit η = 0,99 dhe kushinetat me rul z η = 0,97. Deformimet e rrotës dhe diskut nuk janë dëmtuar.
Figura 4.2 - Modeli i transmisionit frontal
4.3 Modeli dinamik
Modeli mund të ketë 4 shkallë lirie dhe ruh tіl që hyn në model përshkruhet nga një sistem barazish diferenciale, në bazë të rezultateve, të cilat merren nga parametrat dinamikë të makinës. Sistemi i barazive diferenciale mund të shihet:
de Is, Ip - momentet e induksionit të inercisë së pjesëve të motorit dhe trupit të punës që janë mbështjellë;
I1, I2 - induksioni i momentit të inercisë së rrotës dhe diskut në mënyrë korrekte;
φs, φp, φi janë koordinatat kulmore të masave që mbështillen rreth e qark;
Мn - momenti i forcave lëvizëse (dvigun);
Mo - momenti i forcave të mbështetjes (të trupit të punës);
c1, c2 - fortësia e boshteve;
k1, k2 – koeficienti i amortizimit;
ε - falsifikim gjeometrik.
Nga linjat diferenciale, të cilat përshkruajnë sjelljen e makinës në procesin robotik, u krijua një model dinamik. Modeli i palosur Dali vykonuєmo doslіdzhennya. Modeli është projektuar me një injeksion me një fazë, i cili injektohet në boshtin e motorit.
4.4 Përcaktimi i karakteristikave inerciale të rukhlivy
pjesët dhe fortësia e elementeve të makinës
Momentet e inercisë së këmbëve, të cilat mbështillen, nënkuptojnë një rrugë rruzare. Momenti udhëzues i inercisë së pjesëve të motorit, të cilat janë të mbështjella:
Momenti drejtues i inercisë së pjesëve të trupit të punës që janë mbështjellë:
Momenti i drejtimit të inercisë së rrotës:
Momenti udhëzues i inercisë së diskut:
Fortësia Razrahuemo e boshteve:
de - moduli i pranverës i llojit të dytë (zsuvu),
Fortësia e boshtit të splinuar:
Fortësia e gwent:
4.5 Zbatimi i një modeli dinamik në Simulink
Mbi bazën e sistemit të ekuacioneve diferenciale (klauzola 4.3) për sistemin shtesë interaktiv Simulink për modelimin e sistemeve dinamike jolineare, ndërtojmë një diagram të një modeli dinamik për një makinë me një variator fërkimi (Fig. 4.3). Kuptimi i ndryshimeve, si në skemën e modelit dinamik, është dhënë në tabelën 4.1.
Tabela 4.1 - Emërtimet e të ndryshueshmeve që janë fitimtare
në një model dinamik
| Përshkrim | Emërimi | Skema | Od. |
| Momenti drejtues i inercisë së pjesëve të motorit që mbështillen | Është | ||
| Momenti udhëzues i inercisë së detaleve të trupit të punës, të cilat janë mbështjellë. | IP | ||
| Momenti i drejtimit të inercisë së rrotës | I1 | ||
| Momenti drejtues i inercisë së diskut | I2 | ||
| Koordinatat e prera të maskave mbështjellëse | - | radium | |
| Momenti i forcave lëvizëse (dvigun) | Mn | N*m | |
| Momenti i mbështetjes së forcave (trupi i punës); | Mo | N*m | |
| Fortësia e boshtit të splinuar | s 1 | N/m | |
| Fortësia e gwent | c2 | N/m | |
| faktor amortizimi | k1 | - | |
| faktor amortizimi | k2 | - | |
| Koeficienti i stokut | β | b | - |
| falsifikim gjeometrik | ε | e | - |
Figura 4.3 - Zbatimi i një modeli dinamik në Simulink
Të dhënat e daljes:
5 Analiza e proceseve dinamike në objekt
5.1 Analiza e proceseve dinamike në zonën e orës
Nga analiza e grafikëve del qartë se nëpërmjet fuqisë inerciale të objekteve,
Përmes burimeve të fuqisë, falsifikimit gjeometrik dhe forcës së tertës, ndarja e sistemit përmirësohet. Zhvendosja e diskut gjatë sekondës së parë të programit të çift rrotullues, boshti i motorit është praktikisht i barabartë me zero (Fig. 5.1-5.4).
Kjo frymëzohet nga fuqia e sustës së boshtit dhe vidhos dhe fuqia inerciale e timonit dhe diskut, në momentin e lëshimit, mbështjellësi mbështillet, pastaj kur momenti rregullohet për t'u kthyer, mbështjellësi i diskut rrëshqet në momenti.
Figura 5.1 - Thellësia e prerjes në rrotullimin e boshtit të motorit (rad) në orë (s)
Figura 5.2 - Rënia e kutës në kthesën e timonit (rad) në orë (s)
Figura 5.3 - Varësia e Kuta nga rrotullimi i diskut (rad) në orë (s)
Figura 5.4 - Pavarësia e kutës nga rrotullimi i trupit të punës (rad) në orë (s)
5.2 Të dhënat e modelit dinamik
në hapësirën e kampeve
Një model dinamik, i përshkruar me ekuacione diferenciale, mund të përfaqësohet ose në formën e ekuacioneve të matricës (matricat A, C, D) ose të paraqitet në formën e një funksioni transferimi. Meqenëse modeli mund të ketë 4 gradë lirie, atëherë transformimi i Laplace është i nevojshëm për të eliminuar pa probleme funksionin e transmetimit të punës. Për këtë, ne mund të imagjinojmë një model në formën e matricave, vikoristovuchi їх rozrahunka іsistemi ndërveprues MATLAB.
Rreshtimi diferencial i modelit dinamik:
Le të rindërtojmë sistemin.
Imagjinoni një model në një formë matrice:
Le të prezantojmë përkufizimin e mëposhtëm:
Modeli dinamik duket si ky:
Le të shumëzojmë pjesët e lënduara të marrëdhënies në matricën e kthimit:
Matrica e kthimit për ndihmën MATLAB:
L=;
F=[-k1 k1 0 0; 0-k1 k1 0; 0 k2-k2 0; 0 0 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Shumëzoni matricën e anasjelltë me matricën:
R=[-c1 c1 0 0; c1-c1 0 0; 0 0 -c2 c2; 0 0 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Shumëzoni matricën e anasjelltë me matricën:
K=;
Matricat A, B, Z, D mund të duken si:
Le të prezantojmë zbritjen e matricës në skedarin MATLAB M dhe zbritjen e funksionit të transferimit të modelit dinamik, në mënyrë që të përshkruajmë reagimin e modelit ndaj injeksionit si brez (Fig. 5.5, 5.6).
A=;
B=;
Funksioni i transferimit mund të duket si ky:
W(s) = (-2,132e-014 s^7 + 16,39 s^6 + 6,586 s^5 + 3,275e004 s^4 - 2343 s^3- 6,166e006s^2 - 7,573e004 +07 s ^ . 1,101 s^7 + 5156 s^6 + 3080 s^5 + 6,401e006 s^4 + 6,915e005 s^3 - 1,742e008 s^2 - 2,015e007 s + 2,25e-0).
Figura 5.5 - Procesi kalimtar në një model dinamik
Figura 5.6 - Karakteristikat amplitudë-fazë-frekuencë dhe faza-frekuencë
Nga analiza e grafikëve shihet se kogjenerimi i modelit po rritet dhe nuk do të ndalet. Prandaj, është e nevojshme të hartohet një rregullator (lanka korrigjuese) (Fig. 5.7), në mënyrë që modeli dinamik të jetë i vogël, duke u zbehur gjatë procesit të tranzicionit, një orë e vogël qetësie (1-5 sekonda) me tejkalim jo më shumë. se 10-15%.
Figura 5.7 - Modeli dinamik me kontrollues modal
5.4 Dizajni modal i kontrolluesit
Ideja e krijimit të një rregullatori modal bazohet në faktin se është e nevojshme të zgjidhet ky koeficient në mënyrë të tillë që poli i lakut të mbyllur të rregullores të kundërshtojë në zonën e hijezuar. Është e nevojshme të sigurohet koli i zbehur gjatë procesit të tranzicionit dhe një orë e shkurtër qetësie me një tejkalim jo më shumë se 10-15% (Fig. 5.7).
Figura 5.8 - Zona e brazdës së shtyllave të sistemeve të çelikut
Për të inkurajuar një rregullator modal, është e nevojshme të riverifikohet keratinizimi i modelit.
Riverifikimi i keratinizimit kryhet sipas kriterit shtesë të Kalman:
Nëse rangu i matricës katrore Ss(n,n)= është i barabartë me rendin e matricës n, atëherë modeli, i cili përshkruhet nga matricat A,, C, D, është kerovian. Rendi i matricës së modelit dinamik është më i avancuar 8.
Renditja e një matrice është madhësia maksimale e një matrice katrore, shenja e së cilës nuk është e barabartë me zero.
Rangu i matricës mund t'i caktohet një funksioni shtesë gradë në MATLAB:
Renditja e matricës A të modelit dinamik është sipas rendit, gjithashtu modeli Kerovan.
Metoda e përzgjedhjes cakton polet për një funksion të ri transferimi të një cikli të mbyllur. Për ndihmën e MATLAB-it, mund të njihni koeficientin e kontrolluesit modal dhe të merrni procesin kalimtar nga modeli dinamik me kontrolluesin (Fig. 5.9).
p=[-7-0.2i -7+0.2i -5-0.5i -5+0.5i -5 -6 -17 -10];
sysE=ss(A-B*k,B,C,D);
Koeficienti i kontrolluesit modal:
k=[-237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
Nga analiza e grafikut 5.7, shihet se procesi kalimtar i sistemit do të përfundojë për 2.5 sekonda pa tejkalim.
Figura 5.9 - Procesi kalimtar për një model dinamik me një rregullator
Visnovok
Cilët robotë kanë zhvilluar procese dinamike, të cilët kanë disqe me një variator fërkimi. U zgjodhën të dhënat e daljes, u vendos modeli i dizajnit të variatorit të fërkimit, u përcaktuan karakteristikat e inercisë së pjesëve lëvizëse dhe ngurtësia e elementeve të makinës.
Bula ka përpiluar një bllok diagram të objektit që do të hetohet, një përshkrim matematikor të modelit dinamik që lejon sistemin të ndryshojë sjelljen e sistemit në rast të një sulmi të vetëm ndaj tij.
Gjithashtu, u krye një analizë e proceseve dinamike në objektet e zonës së vrojtimit dhe hapësirave të kampeve. Projektimi i një kontrolluesi modal, i cili siguron përfundimin e procesit kalimtar të një modeli dinamik në 2.5 sekonda.
Letërsia
1. Guzenkov P.G. Detajet e makinës: Navch. për universitetet. - M.: Vishch. shkollë, 1986. - 359 f.
2. Bakaev N.A., Voloshina O.M. Bazat e projektimit të ingranazheve të fërkimit. - Prezantimi i Universitetit të Rostovit, 1985. - 176 f.
3. Pronin B.A., Revkov G.A. Transmetimet Bezstupіnchastі klinopasovі dhe friktsіynі. - M.: Mashinobuduvannya, 1980. - 320 f.
4. Komarov M.S. Dinamika e mekanizmave dhe makinerive. Makineri, M., 1969.
5. Ivanov E.A. Lidhjet Mashgiz, M, 1959.
Klasa 56a, 55 g Nr. 145832
Grupi me parapagesë M 284
V. A. Pishchikov
DISTORI FRIKCIONI I MAKINËS SË QEPESËS
Pretenduar më 28 mars 1961. për M 724039/28 º" 12 në Komitetin për të Drejtat e Verëbërësve dhe Vodkritivit pranë Ministrave të Rrezatimit të SRSR
Promovohet lëvizja e fërkimit të makinës qepëse, e cila është më e thjeshtë për dizajnin e saj dhe injektimin kompakt dhe negativ të forcave të inercisë së volantit gjatë fillimit të atij dridhjes së makinës qepëse.
Është konstruktiv për të skuqur lojën friccine të PoleAє, në mënyrë që Scho Vіn të kthehet në krye të SKIV, Zemontovaniya për përfundimin e Cullete pіdshipnikіv në trupin e makinës me rul kabllor, Zovnіshnє Kiltsi Elegni є Provid, rruaj për të sjellë nëpër rul. mbështjellja e unazës së brendshme të kushinetës, e fiksuar në boshtin e kokës së makinës.
Kushinetat Kulkov_ (një lp obdva) janë montuar në trupin e makinës për një tufë shtesë me fileto, të lidhur në pedalin e thikës së makinës.
Në kolltuk, ka një paraqitje skematike të pronimit të makinës fërkuese.
Rrotulla 1 (volant) është forcuar fort në unazën e jashtme të 2 kushinetave standarde konike të kontaktit këndor të rulit, unaza e brendshme e kushinetës së 8-të është e fiksuar fort në boshtin e kokës 4 të makinës qepëse. Ndarësi b, i bërë posaçërisht në vend të një standardi, i lidhur me trupin e makinës ose me një pjesë, i lidhur fort me trupin, për shembull, me një tufë mbajtëse me fileto, e cila transmeton boshtin e susilës; përndryshe unaza mbajtëse 9 fiksohet me një rrotull 1.
Në këtë mënyrë, makina me fërkim do të jetë e sigurt kur makina është e ndezur, shpejtësia do të jetë deri në shpejtësinë maksimale dhe, nga ana tjetër, kur ora e dridhjes së makinës është e ndezur, do të jetë më pak e barabartë. te dridhja e makinës nga ndalimi i disqeve.
I nënshtrohet prodhimit të verës
1. Friczіniy Vіdd Schweinja Machini, Vіdomiy Tim, Shah, scho, Metodat e kontekstit të kontekstit, Vіn kthehet në veten e tij gunner i Shkіv, Zemontovaniy për pіdshipnikіv shtesë Culite në Korpusin e makinës z Mozhlivіstea. boshti i boshtit të Detyrimeve të Kilkoloviy P_DSHIPNIK, Zovnіshnє Kiltsy një element përçues, i cili drejtohet përmes rrotullave dhe fiksohet në trupin e makinës, një ndarës për mbështjelljen në mes të unazës mbajtëse, të fiksuar në boshtin kryesor të Makineria.
2. Lëvizni për paragrafin 1, në rastin e l dhe h dhe y tim të ndrojtur, për OS "në lëvizjen e rrotullës, kushinetat e topit janë një ose tjetri - montuar në trupin e makinës për një tufë shtesë me filetim, i lidhur me pedalin e këmbës
I rregullt A. V. Nechaikin
Techred T. II. 1 urilko Korrektore V. M. Andrianova
Redaktori V, St Haaova
Nga .., deri në psch. 1,111-62 r. Formati boom. 70; 108/,. Vëllimi 0.18 pamje. l.
Zach. 2709 Qarkullimi 500 Cmimi 4 kop.
TsBT1ch Për Komitetin në të djathtë dhe në anën e djathtë të komitetit
Moskë, Qendra, M. Cherkasky prov., D. 2/b.
Drukarnі TsBT11, Moskë, Petrivka, 14
Makinat e fërkimit me një gamë të gjerë rregullimi ndjekin qarkun diferencial.
Makinat e fërkimit janë të përmasave të mëdha për instalime eksperimentale.
Makinë fërkimi pa shkallë e Svіtlozarov.
Rozrahunok fërkimit drive themelet në zgjidhje, otrimanuyu schee Euler për fije gnuchkoi giuchkoi. Duke ofenduar një grua, një dhe e njëjta, një dhe e njëjta, ata shikuan njëri-tjetrin në të njëjtën kohë në një bllok me një tufë fijesh, që mund të jetë elastik.
Efikasiteti i makinës së fërkimit përcaktohet nga koeficienti i tërheqjes.
Në disqet e fërkimit, forca tërheqëse transferohet në një organ fleksibël (qepje, litar, shtizë) duke fërkuar me forcë elementin lëvizës. Makina me fërkim këndon për qepje dhe litarë, do të thotë më shumë - për lancerët.
| Ndrysho grafikën. |
Me një makinë fërkimi në kalli, tensioni është i nevojshëm, përveç përcaktimit tashmë të caktuar, si dhe rangut të kokës, për krijimin e një force të mjaftueshme të bashkimit të elementit tërheqës me buzën e njësisë lëvizëse. Në këtë rast, vlera e yogo-s përcaktohet nga vlera e forcës tërheqëse dhe parametrave të makinës.
Funksionimi normal i disqeve të fërkimit sigurohet nga mbështjelljet e aksesorëve tensionues të instaluar (div. Ch. Në transportues të shkurtër të palëvizshëm (deri në 60 m), të mbështjellë, të tërheqshëm dhe të lëvizshëm, instalohen aksesorët e tensionit mekanik.
Mlinët me makinë fërkimi (Sh-25, Sh-70) janë të pajisura me dy rula lëvizës dhe dy rula mbështetës me vaj plastik.