Швейний електропривод будь-якої промислової машини має не тільки іншу конструкцію регулювання швидкості (фрикціон), а й іншу електричну схему, принцип роботи електродвигуна.
Побутові моделі електричних приводів мають невелику потужність від 40 до 110 Вт, невисоку швидкість обертання та асинхронний тип роботи двигуна. Іншими словами побутовий електродвигун не витримує великих і тривалих навантажень і вимагає періодичного "перепочинку". Швейний двигун промислової машини може працювати цілодобово без перерви, не перегріваючись і не втрачаючи швидкості.
Якщо вам потрібна машинка для масового пошиття, то відразу подумайте про хороший відповідний привод. За оголошеннями можна купити недорого б/у столи із двигунами радянського випуску. Це надійні та працездатні електроприводи і можливо саме такі вам слід використовувати. Але врахуйте, що всі вони працюють дуже галасливо, і ніяким регулюванням цей шум не усунеш. Тому ми рекомендуємо придбати відразу хороші приводи, наприклад стіл і привід, що йдуть в комплекті до швейної машини фірми Typical. І саме такий швейний електропривод ми докладно розглянемо в цій статті.

Швейний електропривод фірми Typical можна купити окремо і встановити на будь-який промисловий стіл, але краще купувати його в комплекті зі столом, тим більше що сам стіл коштує дешевше за двигун.
До речі, зручний швейний стіл можна купити і для побутової швейної машини. Зручний просторий стіл, а заразом і розкрійний швейний стіл зроблять вашу роботу комфортнішою, що обов'язково позначиться на настрої і відповідно до якості роботи. Якщо є можливість і вам доводиться багато шити, не нехтуйте ніколи такими "дрібницями".

Навіть така незначна деталь як вимикач електроприводу створює комфорт у роботі і впливає на настрій.
Потужність електромотора та напруга мережі
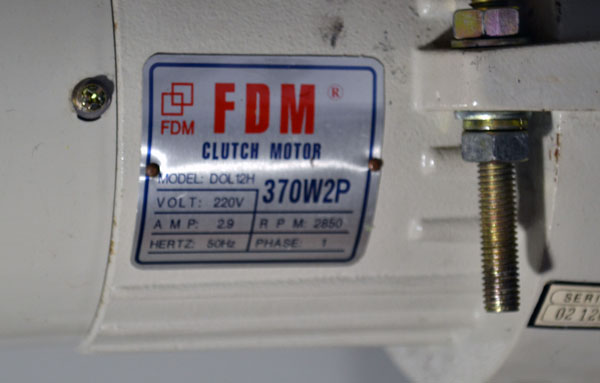
На лицьовій стороні двигуна знаходиться бирка, де вказано напругу мережі і потужність двигуна.
Якщо ви збираєтеся встановлювати машину вдома або в невеликому ательє, де немає розетки на 380 вольт, вибирайте електродвигун на роботу від мережі 220 вольт.
А потужність двигуна в даному прикладіне має особливого значення, оскільки швидкість роботи машинки залежить від інших факторів. Про це ми поговоримо трохи нижче.
Що таке фрикційний привод? Якщо ви керуєтеся автомобілем, то ви повинні знати що таке зчеплення. Так ось фрикціон швейного електроприводу влаштований аналогічно.
Мотор обертається постійно з тією самою швидкістю. При натисканні на педаль диск фрикційного пристрою (Ферадо) з текстолітовими накладками підходить до маховика двигуна і взаємодіє з ним. Чим міцніше ви притискаєте диск фрикціону до маховика електродвигуна, тим краще їхнє зчеплення і вища швидкість. Тому іноді від тривалої роботи на повільній швидкості з'являється запах паленого текстоліту.
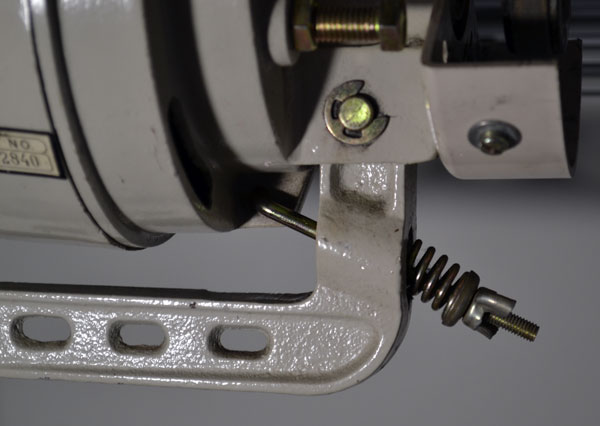
Ступінь вільного ходу (без зусилля) педалі приводу регулюється цим гвинтом.
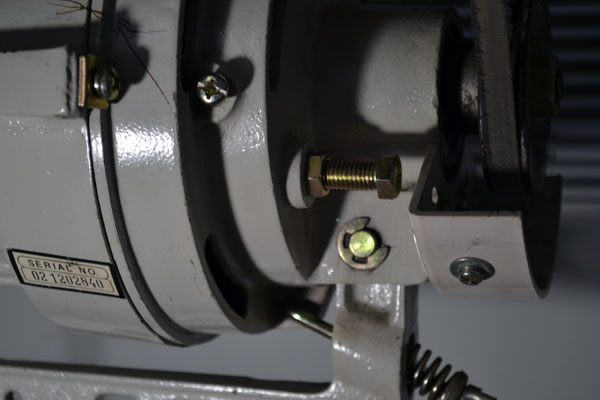
А ось цими гвинтами, точніше двома гвинтами (з зворотного бокуще один) регулюються гальма. Так, саме гальма майже як у автомобіля.
Якщо працювати на високій швидкості, то після зупинки швейної машинки за інерцією вона продовжуватиме обертання. Тому потрібне гальмо, яке відразу зупинить вже непотрібне обертання. Ось цим гвинтом з контргайкою і регулюється ступінь різкості гальма.
Ми не стали викладати фото пристрою фрикціону двигуна, ремонт двигуна повинен виконувати електрик, але регулювати його роботу потрібно вміти своїми руками.
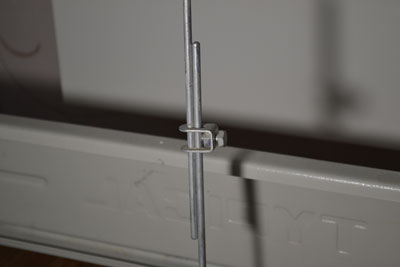
Висоту підйому чи кут нахилу педалі краще регулювати тут.
Від чого залежить швидкість роботи промислової швейної машини

Швидкість роботи промислової швейної машини залежить насамперед від кількості обертів електродвигуна. Цей параметр можна знайти на бирці або паспорті приводу. Але такі деталі цікавлять лише спеціалістів фабричного пошиття. Для дрібних виробників цей параметр роботи двигуна другорядний, оскільки передбачений інший спосіб регулювання швидкості роботи швейної промислової машини.

А саме за допомогою зміни шківа двигуна. Чим більший діаметр шківа, тим вище гранична швидкість роботи швейної машини.
Змінити шків зовсім нескладно, для цього потрібен ключ на 19 і сам шків, який зазвичай додається до двигуна. Але врахуйте, що доведеться регулювати довжину приводного ременя, і у багатьох випадках має бути інший діаметр.

Який не був хороший промисловий привід, навіть такий сучасний, майже безшумний і красивий як у фірми Typical, але не завжди потрібний. Це відноситься до швачок-надомниць. Вони часто працюють вдома на промислових швейних машинах, таких як 1022 клас, 97 клас. З різних причин, але в першу чергу підвищений шум роботи вони не можуть їх використовувати.
Щоб легко і недорого вирішити цю проблему, купіть електропривод TUR-2 і встановіть його безпосередньо на корпус промислової машинки. Як встановити ми не пояснюватимемо, у кожному випадку доводиться використовувати своє рішення. Але можемо порадити, при необхідності, замість штекера припаяти дроти, як показано на фото.
Крім того, якщо у такого двигуна перепаяти місцями положення обмоток, двигун буде обертатися в інший бік. Ця порада вам стане в нагоді при підключенні до такого приводу оверлока.
Але всі ці поради призначені тільки для електрика, любителям украй не рекомендуємо самостійно розбирати двигун, і, тим більше що-небудь там міняти, паяти. Існує не тільки пряма небезпека ураження струмом, а й прихована. Вона проявляється через тривалий час. Від перегріву обмоток двигуна навіть у неробочому стані швейної машинки, але підключеної до мережі може статися спалах обмоток.
Інші марки електродвигунів також можна встановлювати на промислові машини, але рекомендуємо тільки те, що перевірено нами, а саме електропривод TUR-2.
І не забувайте, що швидкість роботи машинки помітно знижується і шити на ній можна недовго, роблячи великі перерви (паузи).
Іноді виникає необхідність розібрати швейну машину, точніше, зняти пластиковий корпус машинки, щоб отримати доступ до деяких вузлів. Така необхідність виникає дуже рідко і виникає вона лише тоді, коли необхідно замінити електродвигун швейної машини чи приводний ремінь. Втім, для заміни електроприводу досить іноді зняти лише нижню та бічну кришку. А ось щоб усунути "заклинювання", доведеться розібрати машинку повністю.
У цій статті ви дізнаєтесь, як знайти причину несправності електроприводу, а також як самостійно замінити електродвигун.
Зазвичай проблеми швейного електроприводу починаються з педалі, а не електродвигуна. Проте самостійно розбирати педаль не рекомендується. Поводьтеся з педаллю обережніше, не перекручуйте дроти, не "ставайте" на них ніжкою стільця і взагалі пам'ятайте, що по цих дротах проходить електричний струм, напругою 220 вольт.

Швейна ручна машинка - пристрій та ремонт приводу
Швейна ручна машинка просто незамінна при пошитті товстих тканин і навіть шкіри. Але ось ручний привід настільки незручний, що використовувати її немає бажання. Однак, цю ситуацію легко виправити, якщо купити швейний електропривод разом із педаллю та приводним ременем у комплекті. Кожен електродвигун має штатне кріплення, що дозволяє його встановити навіть на ручну швейну машинку.
Ніжний привід швейної машини в наш час це музейний експонат. Гримить, стукає, та й ноги втомлюються. До того ж часто машинка починає крутитися не в той бік. Як відмовитися від його використання, якщо машинка Чайка або Подільська вас цілком влаштовує? Потрібно просто встановити швейний електропривод. Кріплення для нього має кожна Чайка. Сам електропривод коштує лише вдвічі дорожче нового ременя ножного приводу.
Приставка зигзаг для швейної машини це хитромудрий пристрій, що імітує виконання рядка зигзаг звичайною пряморядковою машинкою типу Подольськ.
У цій статті ви дізнаєтеся, чому петляє машинка з горизонтальним човником і як цей дефект швейного рядка усунути своїми руками.
Швейна машина не шитиме, якщо неправильно встановлена фрикційна шайба маховика або під час тривалого зберігання заржавіли втулки та ін.
Кожна модель побутової швейної машинки має свій набір лапок. Докладний описвикористання лапок для побутових швейних машинок фірми Janome.
Для роботи з натуральною шкірою потрібні спеціальні інструменти, пристрої для установки фурнітури, клейові та інші прикладні матеріали.
Вимоги до приводу швейних машин.
Тема: Електропривод для швейних машин.
лекція 7.
На швейних машинах привід працює в надзвичайно важких умовах, коли протягом години
провадиться до 1000 пусків машини. Чи знайдеться інша технологічна машина із подібним режимом роботи? А швидкість головного валу до 9000 хв -1! Багато передач не витримують таких швидкостей! Звідси й спеціальні вимоги до електроприводу:
1. Швидкохідність - здатність забезпечити на головному валу машини (5 - 6) 10 3 хв -1.
2. Повинен витримати до 1000 включень-вимкнень на годину.
3. Плавний пуск, плавне регулювання швидкості машини.
4. Управління приводу - педальне з граничною силою натиску на неї - 60 Н стоячи і сидячи до 150 Н.
5. Мати високий К, П, Д, (в цеху стає надмірно спекотно від безлічі тісно розташованих шв-х машин), зручно розташований (не заважати вільно сидіти оператору), безпечний у роботі як в електричному, так і в механічному відношенні.
6. Вартість е/приводу має бути предметом особливого обговорення. (В електроприводах, що автоматизуються, є понад 30 мікросхем, а його вартість еквівалентна вартості головки машини!)
У швейному виробництві застосовуються в основному три типи електроприводів залежно від виду та призначення технологічної машини:
· Контакторний– коли поворотом вимикача або натисканням педалі машина одразу набирає паспортну швидкість. Не потрібно плавності пуску та регулювання швидкості. Привід застосовується на тихохідних, простих пристроїв машинах, що рідко вимикаються (перемотування тканини, її роздублювання і т. д.)
· Фрикційний- коли між простим асинхронним електродвигуном і клиноременной передачею встановлюється фрикційна муфта, що керується від педалі, що забезпечує плавний пуск і плавне регулювання швидкості на ходу машини. Сьогодні має широке поширення як на універсальних, так і на спеціальних машинах.
· Автоматизованийелектропривод. Дозволяє програмувати роботу машини, виконувати автоматично основні та допоміжні операції технологічного циклу. Дорогий і складний, низький К.П.Д. Є тенденція заміни його простим добре регульованим за швидкістю двигуном постійного струму.
На малюнку 5 дано структурну схему фрикційної муфти фрикційного електроприводу швейної машини, на якій позначені:
1. Вал асинхронного електродвигуна,
2. Провідний диск, закріплений нерухомо на кінці цього валу, без кільцевих накладок, сталевий,
Диск ведений, з кільцевими накладками з обох боків із високофрикційного зносостійкого матеріалу.
Диск закріплений на валу 6 фрикційної муфти.
3. Диск гальмівний, нерухомий, часто плаваючий, тобто його площина самовстановлюється в площину диска 3 при зіткненні з ним.
4. Пружина стиснення, прагне вал 6 разом із диском 3 зрушити вправо до зіткнення з диском 4.
5. Вал муфти; нерухома посадка з лівим шарикопідшипником втулки 7 і рухлива з правим.
6. Рухома по горизонталі внутрішня втулка. Рухається в корпусі муфти вправо-ліворуч разом із валом 6.
7. Шків клиноремної передачі, провідний. На старих промислових машинах ставили два шківи - менший (поз.9 не показана) - для обкатки нової або старої ремонту машини; досягалося зниження швидкості машини на 25%.
10. Ролик у пазу рухомої втулки.
11. Двоплечий важіль.
12. Тяга регульованої довжини.
13. Педаль пуску.
14. Корпус муфти, що складається з двох частин (на схемі поділ не показано).
15 . Промстіл машини.
16. Плита, до якої шарнірно знизу приєднується корпус муфти у зборі. У шарнірі – настановний гвинт; служить для фіксації корпусу муфти в потрібному положенні для правильного натягу клиноременної передачі.
Донецький національний технічний університет
Кваліфікаційна робота
На тему:
Розробка динамічної моделі приводу із фрикційним варіатором
Виконав:
Студент гр. МС-03н: Касатка П.О.
Керівник: Деркач О.В.
Консультант: Горобець І.О.
ДОНЕЦЬК 2007
РЕФЕРАТ
Бакалаврська робота: 38 сторінок, 15 малюнків, 1 додаток, 1 таблиця, 5 джерел.
У цій бакалаврській роботі необхідно розробити динамічну модель приводу, що містить фрикційний варіатор; скласти диференціальні рівняння, що описують динамічні процеси у приводі.
Об'єкт дослідження: привід із фрикційним варіатором.
Мета роботи: необхідно розробити динамічну модель приводу, що містить фрикційний варіатор, за допомогою програмного пакету MatLab Simulink, для забезпечення необхідних параметрів перехідного процесу.
ФРИКЦІЙНИЙ ВАРІАТОР, ПЕРЕХІДНИЙ ПРОЦЕС, ДИФЕРЕНЦІЙНЕ РІВНЯННЯ, ДИНАМІЧНА МОДЕЛЬ, ГЕОМЕТРИЧНЕ КОЛЬЖУВАННЯ, МОМЕНТ ІНЕРЦІЇ
Вступ
1 Загальні відомостіпро фрикційні варіатори
2 Вихідні дані
3 Проектний розрахунок фрикційного варіатора за контактною напругою
4 Розробка динамічної моделі
4.1 Структурна схема об'єкта та процесу в ньому
4.2 Аналіз припущень та факторів, що приймаються при створенні моделі
4.3 Динамічна модель
4.4 Визначення інерційних характеристик рухомих деталей та жорсткості елементів приводу
4.5 Реалізація динамічної моделі у Simulink
5 Аналіз динамічних процесів в об'єкті
5.1 Аналіз динамічних процесів у часовій області
5.2 Подання динамічної моделі у просторі станів
5.3 Проектування модального регулятора
Висновок
Перелік посилань
додаток
Вступ
Більшість сучасних машин та установок створюється за схемою: двигун – передача – робочий орган (виконавчий механізм). Необхідність запровадження передачі як проміжного ланки між двигуном і робочими органами машини пов'язані з вирішенням завдання підвищення продуктивності, тобто. збільшення їхньої швидкодії.
Час спрацьовування фрикційної передачі входить у загальний час робочого циклу машини, отже, впливає продуктивність машини загалом. Проблема підвищення продуктивності безпосередньо пов'язана з розробкою методів динамічного дослідження машин та вибору їх оптимальних параметрів та структури.
За допомогою динамічної моделі проводиться аналіз системи, без участі реального об'єкта і на її основі можна побудувати систему управління об'єктом, та поспостерігати за поведінкою системи управління та об'єкта.
1 Загальні відомості про фрикційні варіатори
Фрикційною називають передачу, робота якої заснована на використанні сил тертя, що виникають у місці контакту двох тіл обертання під дією стискаючої сили Q.
Фрикційні передачі обертального руху можна розділити дві основні групи: передачі нерегулируемые, тобто. з умовно постійним передавальним відношенням, та передачі регульовані, що дозволяють плавно змінювати передатне відношення (безступінчасте регулювання) (рис. 1.1).
Однією з найпростіших і у багатьох випадках досить надійною є фрикційна передача, що складається в найпростішому випадку з двох коліс (котків), закріплених на ведучому ведучому валах. Для передачі руху без ковзання необхідно додати до одного з коліс силу Q, достатню для виникнення тертя в місці контакту, при цьому дотична сила їх зчеплення дорівнює за величиною окружного зусилля, що передається .
Рисунок 1.1 – Лобовий фрикційний варіатор
Перевагами фрикційних передач є: плавність і безшумність у роботі, простота конструкції, неможливість поломки при різкій змінікрутного моменту на одному з валів завдяки можливості прослизання котків, можливість безступінчастого регулювання швидкостей на ходу, без зупинки передачі.
Недоліками є: необхідність притискного пристрою, великі тиску на вали та опори від дії зовнішньої сили притискного пристрою, що збільшує їх розміри і робить передачу громіздкою, а також обмежує величину потужності, що передається; мінливість передавального відношення через прослизання котків; порівняно високий знос.
Фрикційні варіатори застосовують як у кінематичних, так і силових передачах у випадках, коли потрібне безступінчасте регулювання швидкості (зубчаста передача не дозволяє такого регулювання). Фрикційні варіатори використовуються в станкобудуванні, в ливарних машинах, підйомних і транспортних машинах, приводах літальних апаратів і металорізальних верстатах, роботах і маніпуляторах, цифрових стежать системах, механізмах для сільського господарства та інших виробах.
Значення фрикційних варіаторів як безступінчастих регуляторів швидкості зростає у зв'язку з широким фронтом робіт із автоматизації управління виробничими процесами.
Один з ковзанок фрикційного варіатора виготовляють із якісних сталей (40, 50, ШХ15 і т.д.), а інший – із сірого чавуну, текстоліту, фібри та інших пластмас.
З усіх типів фрикційних безступінчастих передач з твердими тілами торкання лобові фрикційні варіатори найпростіші конструктивно. У такому варіаторі можна переміщати колесо по валу в напрямках, вказаних стрілками, при цьому передатне відношення плавно змінюватиметься відповідно до зміни робочого діаметра диска.
Геометричне ковзання варіатора визначають за формулою:
знак "+" - для ведучого колеса, знак "-" - для ведучого диска (рис 1.2 і б),
де - радіус диска, при ковзанні максимальне;
b – ширина диска.
Рисунок 1.2 – Лобовий фрикційний варіатор:
а) із провідним колесом; б) із провідним диском
Основний недолік лобових варіаторів - велике геометричне ковзання, тому в силових передачах їх діапазон регулювання передавального відношення доводиться обмежувати.
При провідному колесі його радіус визначають за такою формулою:
При проектному розрахунку приймають:
Коефіцієнт запасу зчеплення;
Мінімальний робочий радіус диска.
Робочі поверхні сталевих фрикційних коліс виконуються шліфованими з шорсткістю Ra 0,63...0,32 мкм.
Щоб уникнути надмірного ковзання, центральну частину диска використовувати не слід.
Розрахунок на контактну напругу слід вести на мінімальному діаметрі диска, при якому потрібна найбільша сила натискання та ковзання досягає найбільшої величини.
Рисунок 1.3 – Натискні пристрої: а) гвинтові; б) кулькове
2 Вихідні дані
Розрахуємо лобову фрикційну передачу для приводу стрічкового конвеєра за умови, що провідне колесо передає потужність Р = 2 кВт за кутової швидкості ω1 =90 рад/з веденому колесу, що обертається з кутовою швидкістю ω2max = 45 рад/с .
Як притискний пристрій вибираємо гвинтовий притискний пристрій, що забезпечує постійну силу притискання.
Призначаємо матеріали коліс: меншого – текстоліт ПТК, а більшого – сталь 45.
Приймаємо діапазон регулювання передавального відношення
Передатне відношення визначаємо за формулою:
Крутний момент Мn, що передається провідним колесом
Для передачі заданої потужності, вираженої окружної силою необхідно забезпечити умову де сила тертя між котками.
де β – коефіцієнт запасу зчеплення коліс, β=1,3.
Момент тертя визначаємо за такою формулою:
3 Проектний розрахунок фрикційного варіатора
по контактним напруженням
Визначимо діаметр d1 меншого колеса із умови контактної міцності. Приймається коефіцієнт запасу зчеплення коліс β=1,3; коефіцієнт тертя довжиною контактної лінії f=0,3; допустима контактна напруга (текстоліт по сталі) [σ]k = 70 Н/мм2, модуль пружності для меншого колеса (текстоліт) Е1=6х103 МПа, для більшого колеса (сталь) Е2 = 2,15х105 МПа.
Наведений модуль пружності Е за такою формулою:
Діапазон регулювання:
При проектному розрахунку приймають
Конструктивно максимальний діаметр диска:
Геометричне ковзання при ведучому колесі:
Інші розміри коліс приймають конструктивно.
4 Розробка динамічної моделі
4.1 Структурна схема об'єкта
Ця система складається з електродвигуна, який створює момент двигуна Мn, муфти, ведучого колеса, веденого диска, підшипників кочення і робочого органу. Двигун створює момент, що крутить, з кутовою швидкістю ω, який передається через муфту на провідне колесо, з нього на ведений диск, потім на робочий орган (рис. 3.1). Гвинтовий притискний пристрій забезпечує передачу моменту, що крутить.
Рисунок 4.1 – Розрахункова схема приводу.
4.2 Аналіз припущень, що приймаються під час створення моделі
Для створення моделі приймаємо електродвигун, що забезпечує постійний момент, що крутить, муфти з η =0,98, кулькові підшипники кочення з η=0,99 і роликові підшипники кочення з η=0,97. Деформації колеса та диска не враховуються.
Рисунок 4.2 – Модель лобової передачі
4.3 Динамічна модель
Модель має 4 ступеня свободи та рух тіл, що входять у модель, описується системою диференціальних рівнянь, на підставі результатів вирішення якої отримаємо динамічні параметри приводу. Система диференціальних рівнянь має вигляд:
де Is, Ip – наведені моменти інерції деталей двигуна і робочого органу, що обертаються;
I1, I2 – наведені моменти інерції колеса та диска відповідно;
φs, φp, φi – кутові координати мас, що обертаються;
Мn - момент рушійних сил (двигуна);
Мо – момент сил опору (робочого органу);
с1, с2 - жорсткості валів;
k1, k2 – коефіцієнти демпфування;
ε – геометричне ковзання.
З диференціальних рівнянь, які описують поведінка приводу у процесі роботи, було складено його динамічна модель. Далі виконуємо дослідження складеної моделі. Навантажуємо модель одиничним ступінчастим впливом, що впливає на вал двигуна.
4.4 Визначення інерційних характеристик рухливих
деталей та жорсткості елементів приводу
Моменти інерції ланок, що обертаються, визначаються розрахунковим шляхом. Наведений момент інерції деталей двигуна, що обертаються:
Наведений момент інерції деталей робочого органу, що обертаються:
Наведений момент інерції колеса:
Наведений момент інерції диска:
Розрахуємо жорсткість валів:
де - модуль пружності 2-го роду (зсуву),
Жорсткість шліцевого валу:
Жорсткість гвинта:
4.5 Реалізація динамічної моделі у Simulink
На основі системи диференціальних рівнянь (п. 4.3) за допомогою інтерактивної системи Simulink для моделювання нелінійних динамічних систем складемо схему динамічної моделі приводу із фрикційним варіатором (рис. 4.3). Позначення змінних, які у схемі динамічної моделі наведено у таблиці 4.1.
Таблиця 4.1 - Позначення змінних, що використовуються
у динамічній моделі
| Опис змінної | Позначення | Схема | Од. |
| Наведений момент інерції деталей двигуна, що обертаються | Is | ||
| Наведений момент інерції деталей робочого органу, що обертаються. | Ip | ||
| Наведений момент інерції колеса | I1 | ||
| Наведений момент інерції диска | I2 | ||
| Кутові координати обертових мас | - | радий | |
| Момент рушійних сил (двигуна) | Mn | Н*м | |
| Момент сил опору (робочого органу); | Мо | Н*м | |
| Жорсткість шліцевого валу | з 1 | Н/м | |
| Жорсткість гвинта | с2 | Н/м | |
| Коефіцієнт демпфування | k1 | - | |
| Коефіцієнт демпфування | k2 | - | |
| Коефіцієнт запасу зчеплення коліс | β | b | - |
| Геометричне ковзання | ε | е | - |
Рисунок 4.3 – Реалізація динамічної моделі у Simulink
Вихідні дані:
5 Аналіз динамічних процесів в об'єкті
5.1 Аналіз динамічних процесів у часовій області
З аналізу графіків видно, що через інерційні властивості об'єктів,
через пружні властивості, геометричного ковзання і сили тертя розгін системи відбувається уповільнено. Переміщення диска в період першої секунди програми крутного моменту вал двигуна практично дорівнює нулю (рис. 5.1-5.4).
Це зумовлено пружними властивостями валу та гвинта та інерційними властивостями колеса і диска, тому в момент пуску відбувається затримка обертання, потім при подоланні моментом, що крутить, моменту прослизання відбувається обертання диска.
Рисунок 5.1 – Залежність кута повороту валу двигуна (рад) від часу (с)
Рисунок 5.2 – Залежність кута повороту колеса (рад) від часу (с)
Рисунок 5.3 – Залежність кута повороту диска (рад) від часу (с)
Рисунок 5.4 – Залежність кута повороту робочого органу (рад) від часу (с)
5.2 Подання динамічної моделі
у просторі станів
Динамічна модель, описана диференціальними рівняннями, може бути представлена у формі матричних рівнянь (матриці А, С, D) або представлена у вигляді передавальної функції. Оскільки модель має 4 ступеня свободи, то перетворення Лапласа необхідне отримання передавальної функції зробити досить складно. Тому представимо модель у формі матриць, використовуючи їх розрахунку інтерактивну систему MATLAB.
Диференціальні рівняння динамічної моделі:
Перетворимо систему.
Представимо модель у матричній формі:
Введемо такі позначення:
Динамічна модель набуває вигляду:
Помножимо обидві частини рівняння на зворотну матрицю:
Зворотну матрицю за допомогою MATLAB:
L=;
F=[-k1 k1 0 0; 0-k1 k1 0; 0 k2-k2 0; 0 0 k2-k2];
0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Помножимо зворотну матрицю на матрицю:
R=[-c1 c1 0 0; c1 -c1 0 0; 0 0 -c2 c2; 0 0 c2-c2];
2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Помножимо зворотну матрицю на матрицю:
К=;
Матриці А, В, З, D мають вигляд:
Введемо отримані матриці в M-file MATLAB і отримаємо передатну функцію динамічної моделі, яка описує реакцію моделі на стрибкоподібний вплив (рис. 5.5, 5.6).
A=;
B=;
Передатна функція має вигляд:
W(s) = (-2.132e-014 s^7 + 16.39 s^6 + 6.586 s^5 + 3.275e004 s^4 - 2343 s^3- 6.166e006s^2 - 7.573e004 s + 1.407e s^8 + 1.101 s^7 + 5156 s^6 + 3080 s^5 + 6.401e006 s^4 + 6.915e005 s^3 - 1.742e008 s^2 - 2.015e007 s + 2.25e-007).
Рисунок 5.5 – Перехідний процес у динамічній моделі
Рисунок 5.6 – Амплітудно-фазо-частотна та фазо-частотна характеристики
З аналізу графіків видно, що коливання моделі зростають і вона не стійка. Тому необхідно спроектувати регулятор (коригуюча ланка) (рис. 5.7), щоб динамічна модель мала загасаючі коливання при перехідному процесі та малий час заспокоєння (1-5 секунд) з перерегулюванням не більше 10-15%.
Рисунок 5.7 – Динамічна модель із модальним регулятором
5.4 Проектування модального регулятора
Ідея створення модального регулятора полягає в тому, щоб підібрати його коефіцієнти так, щоб полюс замкнутого контуру регулювання опинилися в заштрихованій області. Це забезпечить загасаючі коливання при перехідному процесі та короткий час заспокоєння з перерегулюванням не більше 10-15% (рис. 5.7).
Рисунок 5.8 – Область розташування полюсів сталих систем
Для побудови модального регулятора потрібна перевірка керованості моделі.
Перевірку керованості зробимо за допомогою критерію Калмана:
якщо ранг квадратної матриці Ss(n,n)= дорівнює порядку матриці n, то модель, що описується матрицями А,, С, D, є керованою. Порядок матриці динамічної моделі дорівнює 8.
Ранг матриці - максимальний розмір квадратної матриці, визначник якої не дорівнює нулю.
Ранг матриці можна визначити за допомогою функції rankу MATLAB:
Ранг матриці А динамічної моделі дорівнює порядку, отже модель керована.
Методом підбору призначаємо полюси для нової передавальної функції замкнутого контуру. За допомогою MATLAB можна знайти коефіцієнти модального регулятора та отримати перехідний процес у динамічній моделі з регулятором (рис. 5.9).
p=[-7-0.2i -7+0.2i -5-0.5i -5+0.5i -5 -6 -17 -10];
sysE=ss(A-B*k,B,C,D);
Коефіцієнти модального регулятора:
k=[-237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
З аналізу графіка малюнку 5.7 видно, що перехідний процес у системі закінчується через 2,5 секунди без перерегулювання.
Рисунок 5.9 – Перехідний процес у динамічній моделі з регулятором
Висновок
У цьому роботі були вивчені динамічні процеси, що у приводі з фрикційним варіатором. Вибрано вихідні дані, наведено проектний розрахунок фрикційного варіатора, визначено інерційні характеристики рухомих деталей та жорсткості елементів приводу.
Була складена структурна схема об'єкта дослідження, математичний опис та динамічна модель, що дозволяють вивчити можливу поведінку системи при впливі на неї одиничного навантаження.
Також наведено аналіз динамічних процесів в об'єкті у часовій області та просторі станів. Спроектований модальний регулятор, який забезпечує завершення перехідного процесу динамічної моделі за 2,5 секунди.
Література
1. Гузенков П.Г. Деталі машин: Навч. для вузів. - М.: Вищ. шк., 1986. - 359 с.
2. Бакаєв Н.А., Волошина О.М. Основи проектування фрикційних передач. - Видавництво Ростовського університету, 1985. - 176 с.
3. Пронін Б.А., Ревков Г.А. Безступінчасті клинопасові та фрикційні передачі. - М.: Машинобудування, 1980. - 320 с.
4. Комаров М.С. Динаміка механізмів та машин. Машинобудування, М., 1969.
5. Іванов Є.А. Муфти приводів. Машгіз, М, 1959.
Клас 56а, 55 г №145832
Передплатна група М 284
В. А. Піщиков
ФРИКЦІЙНИЙ ПРИВІД ШВЕЙНОЇ МАШИНИ
Заявлено 28 березня 1961 року. за М 724039/28 вЂ" 12 у Комітет у справах винаходів та відкриттів при Раді Міністрів СРСР
Пропонується фрикційний привід швейної машини, який у порівнянні з відомими простіший за своєю конструкцією і компактний і усуває негативний вплив сил інерції маховика в період пуску та вимикання швейної машини.
Конструктивна особливість фрикційного приводу полягає в тому, що він включає приводний шків, змонтований за допомогою кулькових підшипників на корпусі машини з можливістю осьового переміщення і забезпечений конічним роликовим підшипником, зовнішнє кільце якого є провідним елеменгом, що приводить через ролики і закріплений на корпусі машин. обертання внутрішнє кільце підшипника, закріплене головному валу машини.
Кулькові підшипники (один ілп обидва) змонтовані на корпусі машини за допомогою різьбової втулки, пов'язаної з педаллю ножа машини.
На кресленні схематично зображений пропонований фрикційний привід.
Шків 1 (маховик) нерухомо укріплений на зовнішньому кільці 2 конічного стандартного роликового радіально-упорного (плі шарикового радіально ілп шарикового радіально-упорного підшипника), Внутрішнє кільце 8 цього підшипника нерухомо закріплено на головному валу 4 швейної машини безпосередньо. Сепаратор б, спеціально виготовлений замість стандартного, скріплений з корпусом машини або деталлю, жорстко пов'язаною з корпусом, наприклад, різьбовою підшипниковою втулкою 7. На різьбову частину втулки 7 нагвинчений важіль-гайка о, що несе на собі одне з кілець кулькового підшипника 9, що передає осьові зусилля; інше кільце підшипника 9 скріплено зі шківом 1.
Таким чином, фрикційний привід забезпечує при включенні машини її швидкий розгін до максимальної швидкості і, навпаки, при відключенні час вибігу машини буде найменшим порівняно з вибігом машини із застосуванням відомих приводів.
Предмет винаходу
1. Фрикційний привід швейної машини, відомий тим, що, з метою спрощення конструкції і досягнення високої компактності, він включає в себе приводний шків, змонтований за допомогою кулькових підшипників на корпусі машини з можливістю осьового переміщення і забезпечений конічним роликовим підшипником, зовнішнє кільце якого є провідним елементом, що приводить через ролики, і закріплений на корпусі машини сепаратор для обертання всередині íåå кільце підшипника, закріплене на головному валу машини.
2. Привід за п. 1, від л і ч а ю шийся тим, що для ос«во переміщення шківа кулькові підшипники вЂ" один або обидва вЂ" змонтовані на корпусі машини за допомогою різьбової втулки, пов'язаної з ножною педаллю
Упорядник А. В. Нечайкін
Техред T. II. 1 урилко Корректор В. М. Андріанова
Редактор В, Ст Хааова
По.., до псч. 1.111-62 r. Формат бум. 70; 108/,. Об'єм 0,18 вид. л.
Зак. 2709 Тираж 500 Ціна 4 коп.
ЦБТ1ч Комітету у справах та;.набутків та відкриттів при Раді Міністрів СРСР
Москва, Центр, М. Черкаський пров., Д. 2/б.
Друкарні ЦБТ11, Москва, Петрівка, 14
Фрикційні приводи з широким діапазоном регулювання виконують за диференціальною схемою.
Фрикційні приводи є надзвичайно зручними для експериментальних установок.
Безступінчастий фрикційний привод Світлозарова.
Розрахунок фрикційного приводу заснований на рішенні, отриманому ще Ейлером для гнучкої гнучкої нитки. Обидва вчені незалежно один від одного і майже одночасно розглянули взаємодію блоку з гнучкою ниткою, що має певну пружність.
Ефективність фрикційного приводу визначається тяговим коефіцієнтом.
У фрикційних приводах тягове зусилля передається на гнучкий орган (стрічку, канат, ланцюг) силою тертя його приводний елемент. Фрикційний привід зазвичай застосовують для стрічок і канатів, значно рідше - для ланцюгів.
| Графіка зміни. |
При фрикційному приводі початкове натяг необхідно, крім вже зазначеного призначення, також, головним чином, для створення достатньої сили зчеплення тягового елемента з ободом приводного блоку. При цьому величина його обумовлюється величиною тягового зусилля та параметрами приводу.
Нормальна робота фрикційних приводів забезпечується завдяки дії встановлених натяжних пристроїв (див. гл. На коротких стаціонарних (до 60 м), катучих, пересувних та переносних конвеєрах застосовують механічні натяжні пристрої.
Млини з фрикційним приводом (Ш-25, Ш-70) мають два приводні ролики і два опорні ролики з пластичним мастилом.